单阀直控式高速开关阀液压同步系统数学模型的建立
2024-06-16
以单阀直控式高速开关阀液压同步控制系统为研究对象,用数学的方法对液压回路的动态特性进行了描述,并在此基础上建立同步系统的数学模型,为进一步开展系统仿真分析及控制策略的研究提供了可靠的理论依据。

 单阀直控式高速开关阀液压同步系统数学模型的建立
单阀直控式高速开关阀液压同步系统数学模型的建立 以单阀直控式高速开关阀液压同步控制系统为研究对象,用数学的方法对液压回路的动态特性进行了描述,并在此基础上建立同步系统的数学模型,为进一步开展系统仿真分析及控制策略的研究提供了可靠的理论依据。

hsv高速开关阀 1 贵州红林车用电控技术有限公司 hsv系列开关式高速电磁阀 hsv系列开关式高速电磁阀系列产品是我公司与美国bkm公司联合研制、生 产的快速响应开关式数字阀,是一种用于机电液一体化中电子与液压机构间理想的 接口元件。该系列产品结构紧凑、体积小、重量轻、响应快速、动作准确、重复性 好、抗污染能力强、内泄漏小、可靠性高。最显著的特点是该产品能够直接接受数 字信号对流体系统的压力或流量进行pwm控制,该特点为数字控制进入液压气动 领域提供了有效手段。1992年该产品被评为国家级重点新产品并获得贵州省科学技 术进步二等奖。 hsv高速电磁阀系列产品具有两通常开、两通常闭、三通常开、三通常闭四个 系列近200个品种;材料有碳钢、不锈钢两种类别;工作方式可采用连续加载、脉 冲宽幅调制、频率调制或脉宽——频率混合调制。 hsv高速电磁阀系列产品的上述特点使该电
编辑推荐下载
格式:pdf
大小:135KB
页数:5P
人气:94
 4.3
4.3
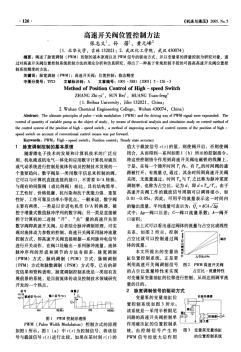
PWM高速开关阀控液压缸位置控制系统的模糊控制 四个高速开关阈经过恰当的组合,用pwm方法可以对双作用油缸的位置和方向进行控制,为了克服液压系统建模的复杂性和阀控缸的非线性对传统控制算法的影响。设计了一种模糊控制器,实现了pwm高速开关阀控液缸位置系统的精确控制,实验证明,模糊控制是对高速开关阀进行控制的有效工具,它为高速开关阀的工作中的应用开辟了广阔的前景。
格式:pdf
大小:344KB
页数:未知
人气:94
4.4
PWM高速开关阀控液压缸位置控制系统的模糊控制 四个高速开关阀经过恰当的组合,用pwm方法可以对双作用油缸的位置和方向进行控制。为了克服液压系统建模的复杂性和陶控缸的非线性对传统控制算法的影响,设计了一种模糊控制器,实现了pwm高速开关阀控液压缸位置系统的精确控制,实验证明:模糊控制是对高速开关阔进行控制的有效工具,它为高速开关阀在工程中的应用开辟了广阔的前景。
热门文档 单阀直控式高速开关阀液压同步系统数学模型的建立
格式:pdf
大小:323KB
页数:4P
人气:94
4.5
一种基于超磁致伸缩效应的新型液压高速开关阀的研究 文章介绍了一种新型的液压高速开关阀,它采用了超磁致伸缩驱动器和锥体式阀芯结构。该阀具有很高的切换速度和频率,可以用来作为大流量高速开关阀的先导控制阀,也可以在小流量回路中直接作为控制阀使用。
格式:pdf
大小:747KB
页数:4P
人气:94
4.3
高速开关阀控液压缸位置控制系统的H_∞控制 以pwm高速开关阀控液压缸位置控制系统为研究对象,建立了该系统的数学模型。为了克服不确定参数对系统造成的干扰,设计了一种单变量h∞控制器,给出了其设计过程和方法。并对该模型进行数字仿真和实验分析,仿真及实验结果表明了h∞最优灵敏度控制器的优越性,不仅对干扰不敏感,且在参数改变时,仿真曲线几乎没有发生变化,即h∞控制器具有很强的鲁棒性。同时也证明了h∞控制器是对高速开关阀中的参数干扰进行控制的有效工具。
格式:pdf
大小:617KB
页数:3P
人气:94
4.7
基于PWM高速开关阀的液压位置系统最优预见控制研究 本文以两个高速开关阀经过适当的组合,并采用pwm技术对油缸活塞的位置和方向进行控制,考虑到油缸各构件之间的配合间隙所引起的机械滞后,以及控制元件本身的响应滞后等等因素,本文采用预见控制的方法来实现油缸活塞的精确控制,仿真结果表明预见控制能够消除各种原因所引起的响应滞后,从而获得良好的控制效果。
格式:pdf
大小:346KB
页数:3P
人气:94
4.4
基于PWM高速开关阀的液压位置系统最优预见控制研究 以2个高速开关阀经过适当的组合,并采用pwm技术对油缸活塞的位置和方向进行控制,考虑到油缸各构件之间的配合间隙所引起的机械滞后,以及控制元件本身的响应滞后等因素,采用预见控制的方法来实现油缸活塞的精确控制。仿真结果表明:预见控制能够消除各种原因所引起的响应滞后,从而获得良好的控制效果
格式:pdf
大小:127KB
页数:6P
人气:94
4.4
液压高速开关阀位置控制系统在泵/马达上的应用研究 液压高速开关阀位置控制系统在泵/马达上的应用研究
精华文档 单阀直控式高速开关阀液压同步系统数学模型的建立
格式:pdf
大小:923KB
页数:3P
人气:94
4.7
基于DSP的高速开关阀控液压缸位置控制系统研究 基于dsp的液压伺服系统,以tms320lf2407a芯片为主处理器,设计了一种数字控制器。该控制器可以提高液压伺服控制系统的控制精度和减少超调量,增强了系统的跟踪能力,能实现系统的实时在线控制,并满足系统的动态控制要求。
格式:pdf
大小:388KB
页数:4P
人气:94
4.5
高速开关阀先导控制注塑机注射液压系统的仿真研究 给出了高速开关阀先导控制的二通插装阀应用在注塑机上的注射系统液压原理图,并在amesim仿真环境下,分析关键参数如系统液阻、调制频率、占空比、负载。仿真结果表明,采用高速开关阀先导控制实现了对插装阀阀芯的位置控制,验证了系统原理的可行性。
格式:pdf
大小:336KB
页数:未知
人气:94
4.4
基于PWM高速开关阀的液压位置系统最优控制研究 本研究用两个二位三通高速开关阀作为控制阀,应用pwm脉调制技术,采用线性二次型最优控制原理,实现了液压缸活塞的精确定位。
格式:pdf
大小:150KB
页数:未知
人气:94
4.7
超磁致伸缩型滚压高速开关阀的研究 对基于超磁致伸缩驱动器的高速液压开关阀进行了初步的研究,设计了单和双联锥体式阀芯的高速开关阀结构,还对这种阀的主要性能参数做了简要分析。
最新文档 单阀直控式高速开关阀液压同步系统数学模型的建立
格式:pdf
大小:125KB
页数:2P
人气:94
4.6
高速开关阀先导控制的电液位置系统设计 针对一般液压系统控制的动力滑台的非线性特性,设计能满足高精度定位的液压控制系统。采用高速开关阀先导控制的阀控缸系统,通过改变控制信号的脉冲宽度调制率,可以控制液流的方向和流量,实现执行机构的无级调速,并可方便地实现平稳的加速和减速过程,降低系统冲击和噪声。
格式:pdf
大小:730KB
页数:4P
人气:94
4.8
高速开关阀在调速控制系统中的应用 运用pwm对高速开关阀进行数字控制,以满足电液控制系统精度高,响应快的要求。提出了高速开关阀在调速控制系统中的应用,利用vb编写界面进行人机对话,实现vb与plc的串行通信。用本系统模拟工程机械破碎挖掘机的工作过程,仿真及实验结果表明,高速开关阀在调速控制系统的应用具有理论和现实意义。
格式:pdf
大小:272KB
页数:4P
人气:94
4.8
高速开关阀控换向阀闭环系统的静态设计 针对旋转平台的工作特点,采用高速开关阀控液压系统对旋转平台的顺时针和逆时针的往复旋转运动进行控制。根据系统的特点,采用闭环控制,使设计出的旋转平台回转定位的高速开关阀控液压系统能够满足设计指标的要求。
格式:pdf
大小:393KB
页数:未知
人气:94
4.7
模拟式脉宽调制高速开关阀的静特性 本文研究了由模拟式脉宽调制器控制高速开关阀的静特性。对自然采样双沿调制模拟式脉宽调制器进行了分析,从物理概念和工程应用的角度探讨了阀的开启和关闭时间对其静特性的影响以及对载波频率的制约关系。
格式:pdf
大小:638KB
页数:3P
人气:94
4.5
基于高速开关阀微调的气压精密控制 该文提出了一种基于高速开关阀微调的气压精密控制方法,文中详细叙述了该方法的控制策略。用该控制策略控制高速开关阀,可以实现压力容器微小流量的供给与排出,达到了压力的精密控制目的。实验结果验证了该控制方法的有效性和可行性。

格式:pdf
大小:585KB
页数:4P
人气:94
4.7
高速开关阀的气缸定位控制 首先分析了基于pwm高速开关阀的气缸定位控制系统的工作原理,在此基础上建立阀控缸定位系统的数学模型。应用脉宽调制方式以及常规pid控制算法和模糊pid控制算法,在matlab/simulink上对基于高速开关阀的气缸定位系统进行了仿真。仿真结果表明,用模糊pid控制算法控制阀控缸定位系统,可以实现更快速、更精确的气动执行器位置伺服控制。
格式:pdf
大小:335KB
页数:未知
人气:94
4.5
高速开关阀在液压缸起动与到位过程中的速度控制研究 为了研究液压缸起动和到位过程中的速度控制问题,设计了高速开关阀与液压缸并联连接的油路,即将高速开关阀连接于液压缸有杆腔与无杆腔之间。分别针对液压缸起动和到位两个过程的速度控制问题,开展了仿真与实验研究。研究结果表明,高速开关阀能有效降低液压缸起动时的活塞最大加速度和到位时的活塞末速度,实现起动过程和到位过程中的速度控制。
文辑创建者
我要分享 >
职位:测量监理工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐