精品文献
擦窗机器人的工作原理
 分布式擦窗机器人控制系统设计
分布式擦窗机器人控制系统设计
分布式擦窗机器人控制系统设计
根据试验平台对开放性、实时性和可靠性的需求,为"蓝天洁士-4"型擦窗机器人设计了分布式控制系统。系统以ARM微控制器和AVR单片机组成的上下位机构成机器人本体控制器,以PC机构成机器人监控和规划器。为了兼顾系统的安全性和开放性,在机器人本体控制器的上位机中采用了基于μC/OS-Ⅱ的RTOS作为开发平台,在PC机上利用动态链接库封装机器人底层动作和信息查询指令。给出了多任务系统的任务划分规则,利用多线程实现了监控软件,分析了动作线程和查询线程的工作流程。
擦窗机类型
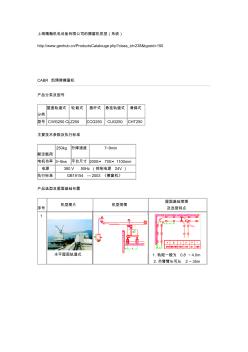
上海精瀚机电设备有限公司的擦窗机类型(系统) http://www.genhub.cn/ProductsCatalouge.php?class_id=238&typeid=150 CABR 凯博牌擦窗机 产品分类及型号 分类 屋面轨道式 轮载式 插杆式 悬挂轨道式 滑梯式 型号 CWG250 CLZ250 CCG250 CUG250 CHT250 主要技术参数及执行标准 额定载荷 250kg 升降速度 7~9min 电机功率 3~5kw 平台尺寸 2000× 700× 1100mm 电源 380 V 50Hz (控制电源 24V ) 执行标准 GB19154 — 2003 《擦窗机》 产品选型及屋面基础布置 序号 机型图片 机型简图 屋面基础简图 及选型特点 1 水平屋面轨道式 1. 轨距一般为 0.8 ~4.0m 2.吊臂臂长可从 2~35m 2 附墙屋面轨道式 1.