标准坐标文献

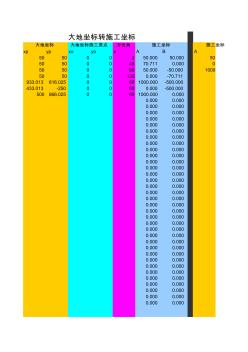 大地坐标施工坐标互转
大地坐标施工坐标互转
大地坐标施工坐标互转
方位角 xp yp xo yo a A B A 50 50 0 0 0 50.000 50.000 50 50 50 0 0 45 70.711 0.000 0 50 50 0 0 90 50.000 -50.000 1000 50 50 0 0 135 0.000 -70.711 933.013 616.025 0 0 60 1000.000 -500.000 433.013 -250 0 0 60 0.000 -500.000 500 866.025 0 0 60 1000.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.00
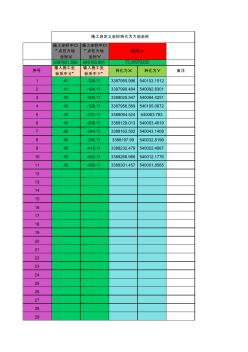 施工坐标转换大地坐标,大地坐标转换施工坐标
施工坐标转换大地坐标,大地坐标转换施工坐标
施工坐标转换大地坐标,大地坐标转换施工坐标
施工坐标中O ′点在大地 坐标X 施工坐标中O ′点在大地 坐标Y 3387821.509 540100.601 序号 输入施工坐 标系中X′ 输入施工坐 标系中Y′ 转化为X 转化为Y 备注 1 41 -128.11 3387955.996 540103.1512 2 41 -164.11 3387990.484 540092.8301 3 43 -200.11 3388025.547 540084.4251 4 43 -128.11 3387956.569 540105.0672 5 43 -272.11 3388094.524 540063.783 6 43 -308.11 3388129.013 540053.4619 7 43 -344.11 3388163.502 540043.1408 8 43 -380.11 3388197.99 540032.8198 9 43 -416