标准坐标简介文献


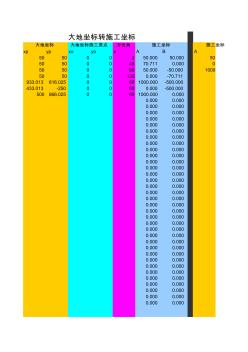 大地坐标施工坐标互转
大地坐标施工坐标互转
大地坐标施工坐标互转
方位角 xp yp xo yo a A B A 50 50 0 0 0 50.000 50.000 50 50 50 0 0 45 70.711 0.000 0 50 50 0 0 90 50.000 -50.000 1000 50 50 0 0 135 0.000 -70.711 933.013 616.025 0 0 60 1000.000 -500.000 433.013 -250 0 0 60 0.000 -500.000 500 866.025 0 0 60 1000.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.00