步距角常见参数文献

 基于相关分析的LED路灯光强分布测试步距角优化研究
基于相关分析的LED路灯光强分布测试步距角优化研究
基于相关分析的LED路灯光强分布测试步距角优化研究
优化LED路灯光强分布测试系统的测试步距角可以较大程度地提高LED路灯测试的效率。选择不同的测试步距角对LED路灯的光强分布进行测试,将1°测试步距角所测得的路灯光强分布视为真值,采用相关分析的方法研究在较大步距角下所测得的路灯光强分布与真值之间的近似程度。研究结果显示,当相关系数要求在98%左右时,可以选择15°测试步距角对LED路灯的光强分布进行测试,相对于真值测试,在此步距下LED路灯的测试时间减少了98%以上,极大地提高了测试效率。
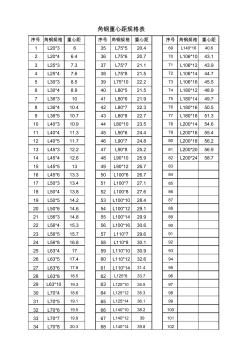 角钢重心距
角钢重心距
角钢重心距
序号 角钢规格 重心距 序号 角钢规格 重心距 序号 角钢规格 重心距 1 L20*3 6 35 L75*5 20.4 69 L140*16 40.6 2 L20*4 6.4 36 L75*6 20.7 70 L106*10 43.1 3 L25*3 7.3 37 L75*7 21.1 71 L106*12 43.9 4 L25*4 7.6 38 L75*8 21.5 72 L106*14 44.7 5 L30*3 8.5 39 L75*10 22.2 73 L106*16 45.5 6 L30*4 8.9 40 L80*5 21.5 74 L180*12 48.9 7 L36*3 10 41 L80*6 21.9 75 L180*14 49.7 8 L36*4 10.4 42 L80*7 22.3 76 L180*16 50.5 9 L36*5 10.7 43 L80*8 22.7 77