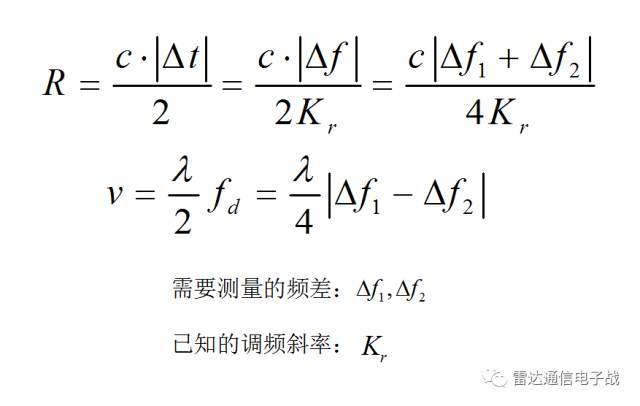
测速原理文献

 霍尔元件测速电路
霍尔元件测速电路
霍尔元件测速电路
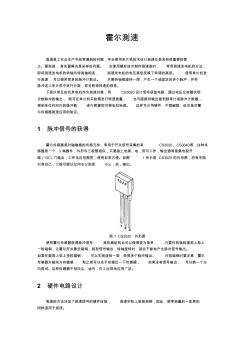
霍尔测速 测速是工农业生产中经常遇到的问题,学会使用单片机技术设计测速仪表具有很重要的意 义。要测速,首先要解决是采样的问题。 在使用模拟技术制作测速表时, 常用测速发电机的方法, 即将测速发电机的转轴与待测轴相连, 测速发电机的电压高低反映了转速的高低。 使用单片机进 行测速, 可以使用简单的脉冲计数法。 只要转轴每旋转一周,产生一个或固定的多个脉冲,并将 脉冲送入单片机中进行计数,即可获得转速的信息。 下面以常见的玩具电机作为测速对象,用 CS3020设计信号获取电路,通过电压比较器实现 计数脉冲的输出, 既可在单片机实验箱进行转速测量, 也可直接将输出接到频率计或脉冲计数器, 得到单位时间内的脉冲数, 进行换算即可得电机转速。 这样可少用硬件,不需编程,但仅是对霍 尔传感器测速应用的验证。 1 脉冲信号的获得 霍尔传感器是对磁敏感的传感元件,常用于开关信号采集的有 CS3020、CS
 直流电机测速解析
直流电机测速解析
直流电机测速解析
北京工业大学课程设计报告 (数电课设题目) 直流电机测速 班 级: 130242 学 号: 13024212 姓 名: 王栩晖 组 号: 19 2015 年 4 月 一.设计技术指标及设计要求 (一)设计任务 设计一个能对直流电机运行速度进行调速和测速的电路。 (二)基本要求 设计一个脉宽调速电路,实现对直流电机转速的控制。利用光电脉冲转换、 整形、门控电路和计数电路测出直流电机的转速, 并显示在数码管上。 要求转速 300转/分以下,越低越好。 (三)扩展要求 在完成基本要求的基础上加光耦脉冲计数和相位判别电路,进而识别电机的转 向,并由 LED显示转向的正反。 三.设计框架 方波发生器 100HZ 脉宽 调整 驱动 电路 脉冲 整形 脉冲显 示电路 计数器 门控 电路 光电脉冲 转换电路 直流 电机 测量转向 电路 控制转向 电