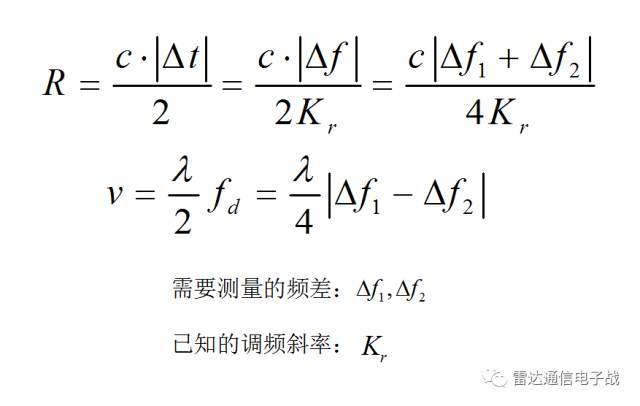
测速原理微波雷达文献

 雷达测速卡口方案
雷达测速卡口方案
雷达测速卡口方案
浙江徳威电子有限公司 DSIPC4472-6高清网络摄像相机智能卡口系 统 浙江徳威电子有限公司高清网络摄像相机智能卡口系统 目录 一、 徳威电子高清智能卡口系统简介 .................................................................... 3 二、 设计原则 ......................................................................................................... 4 三、 设计依据 ......................................................................................................... 6 四、 系统整体描述 ..
 智能雷达微波感应LED日光灯的原理
智能雷达微波感应LED日光灯的原理
智能雷达微波感应LED日光灯的原理
智能雷达微波感应 LED日光灯的原理 1、雷达微波感应器的原理 A雷达简介 首先还是说一下什么是雷达微波,所谓雷达 ,其实就是介于红外线和 FM之间的电磁波 ,频率范围在 300M-300GHz,它和光速一样 ,以每秒 C=299792458米/秒的速度将电信号进行空中传输 . 而微波主要是指 它本身的电磁波波长很短 1mm-1米这个范围 ,所以就叫着微波 ,人们 还管叫 "超高频电磁波 ". B 雷达微波感应器的工作原理 合明光电研制的雷达微波感应电源的工作频率一般固定在 5.8GHz正 负 75MHz这个范围。 A启动 --- 感应器上电后,感应器中振荡电路会自动产生一个 5.8GHz 正负 75MHz的频率,我们称它为本振频率 B放大 --- 该本振频率通过 运放放大以后作为电磁波载体 ,通过高频管(也可以叫天线)向空中 发射发出 B接收 -- 发射出去后的电磁波通过周围的物体