采用惯性传感器的输电导线舞动监测系统舞动定位算法设计文献

 覆冰输电导线舞动及防舞效果分析
覆冰输电导线舞动及防舞效果分析
覆冰输电导线舞动及防舞效果分析
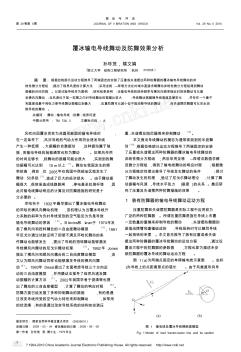
? 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net 振 动 与 冲 击 第 29卷第 5期 JOURNAL OF V IBRATION AND SHOCK Vol. 29 No. 5 2010 覆冰输电导线舞动及防舞效果分析 基金项目 : 国家自然科学基金重点项目 (50638010 ) 收稿日期 : 2009 - 03 - 04 修改稿收到日期 : 2009 - 06 - 09 第一作者 孙珍茂 男 ,博士生 , 1979年生 孙珍茂 , 楼文娟 (浙江大学 结构工程研究所 ,杭州 310058 ) 摘 要 : 根据拉格朗日运动方程推导了两端固定的安装了压重或失谐摆这两种防舞器的覆冰输电导线舞动的非 线性微分
 输电线路导线舞动远程监测系统
输电线路导线舞动远程监测系统
输电线路导线舞动远程监测系统
输电线路导线舞动远程监测系统 作者: 张占龙, 邓军, 毛玉星, 陈正宇, 熊兰, 蒋涛, Zhang Zhanlong, Deng Jun, Mao Yuxing, Chen Zhengyu, Xiong Lan , Jiang Tao 作者单位: 张占龙,邓军,毛玉星,熊兰,Zhang Zhanlong,Deng Jun,Mao Yuxing,Xiong Lan(重庆大学输 配电装备及系统安全与新技术国家重点实验室,重庆,400044) , 陈正宇,Chen Zhengyu(重庆 江津供电局 重庆 402260) , 蒋涛,Jiang Tao( 长治市供电公司 长治 046000) 刊名: 现代科学仪器 英文刊名: MODERN SCIENTIFIC INSTRUMENTS 年,卷(期): 2008(2) 参考文献(5条) 1.王丽新;杨文兵;杨新华;袁俊杰 输电线路舞动的有限元