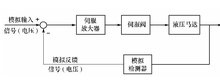
电液伺服结构系统低周反复系统主要功能文献

 道闸主要功能
道闸主要功能
道闸主要功能
道闸 主要功能: 功能一,手动按钮可作 ‘升’‘降’及‘停’操作、无线遥控可作 ‘升’‘降’‘停’及对手动按钮的 ‘加锁’‘解锁 ’操作 ; 功能二,停电自动解锁,停电后可手动抬杆 ; 功能三,具有便于维护与调试的 ‘自检模式 ’; 道闸 道闸又称挡车器,最初从国外引进,英文名叫 Barrier Gate ,是专门用于道路上限 制机动车行驶的通道出入口管理设备 ,现广泛应用于公路收费站、 停车场系统 管理车 辆通道,用于管理车辆的出入。电动道闸可单独通过无线遥控实现起落杆,也可以通过 停车场管理系统 (即 IC 刷卡管理系统)实行自动管理状态,入场取卡放行车辆,出场 时,收取 停车费 后自动放行车辆。

 纬地第一章系统主要功能及常规应用步骤
纬地第一章系统主要功能及常规应用步骤
纬地第一章系统主要功能及常规应用步骤
纬地第一章系统主要功能及常规应用步骤——该资料为第一章系统主要功能及常规应用步骤系统沿用传统的导线法(交点法)经典理论,可进行任意组合形式的公路平面线形设计计算和多种模式的反算。用户可在计算机屏幕上交互进行定线及修改设计,在动态拖动修改交点位...