“光谷杯”第三届中国研究生机器人创新设计大赛赛事背景文献

 长庆杯全国大学生机械创新设计大赛决赛评审结果
长庆杯全国大学生机械创新设计大赛决赛评审结果
长庆杯全国大学生机械创新设计大赛决赛评审结果
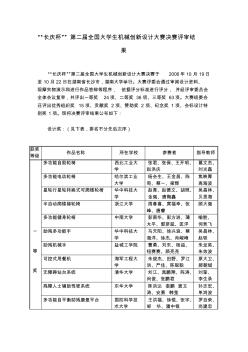
“长庆杯” 第二届全国大学生机械创新设计大赛决赛评审结 果 “长庆杯”第二届全国大学生机械创新设计大赛决赛于 2006年 10月 19日 至 10月 22日在湖南省长沙市,湖南大学举行。大赛评委会通过审阅设计资料、 观摩实物演示和进行作品答辩等程序, 依据评分标准进行评分, 并经评审委员会 全体会议复审,共评出一等奖 24项、二等奖 36项、三等奖 63项。大赛组委会 还评出优秀组织奖 15项、贡献奖 2项、赞助奖 2 项、纪念奖 1项、会标设计特 别奖 1项。现将决赛评审结果公布如下: 设计奖:(见下表,排名不分先后次序) 获奖 等级 作品名称 所在学校 参赛者 指导教师 一 等 奖 多功能自助轮椅 西北工业大 学 张君、张保、王开明、 赵洪庆 葛文杰、 刘光磊 多功能电动轮椅 哈尔滨工业 大学 杨会生、王金昌、陈 奇、蔡一、梁辉 焦映厚 高海波 星轮行星轮转换式可爬楼轮椅 华中科技大
 第三届全国青年建筑师创新设计高峰论坛在京举办
第三届全国青年建筑师创新设计高峰论坛在京举办
第三届全国青年建筑师创新设计高峰论坛在京举办
2011年5月18日,由中国建筑学会主办的\"第三届全国青年建筑师创新设计高峰论坛暨第八届中国建筑学会青年建筑师奖颁奖典礼\"在京举办。中国建筑学会秘书长、国际建筑师协会理事周畅,中国中建设计集团有限公司执行总经理周文连,中国建筑设计研究院副院长、总建筑师、全国工程勘察设计大师