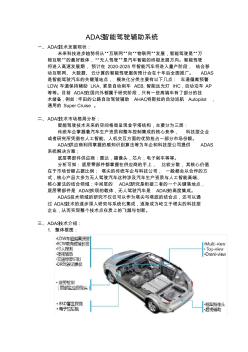
驾 驶辅助系统组成
它主要由GPS和CCD相机探测模块、通信模块和控制模块等组成。其中,GPS和CCD相机探测模块通过GPS接收机接收GPS卫星信号,求出该车的经纬度坐标、速度、时间等信息,利用安装在汽车前部和后部的CCD相机,实时观察道路两旁的状况;通信模块可以发送检测到的相关信息并在相互靠近的汽车之间实时地传输行驶信息;控制模块可以在即将出现事故的时候做出主动控制,从而避免事故的发生。
GPS模块和CCD相机探测模块
在汽车驾驶过程中,最容易出现碰撞事故的地方就是在拐角处,这是因为汽车设计过程中,其前视窗有视野死角,使得驾驶者在转弯时没有很好的视野,从而不能对即将发生的事故做出迅速明确的判断。为了最大限度地消除视野死角问题,驾驶辅助系统利用GPS和CCD相机探测模块得到车辆的行驶数据,包括车辆的位置、速度、两车接近速度等。 为了反映车间的距离位置信息,这里将地理信息系统(GIS)中的道路信息融入GPS定位数据系统,构成融合GPS信息系统。在GIS中,为了真实地反映地理实体,记录的数据不仅包含实体的位置、形状、大小和属性,还记录了实体间的相互关系,这样结合能够很好地满足本系统的需要。因此,GPS卫星传递的位置信息不仅包括汽车所处的经度和纬度,还包括海拔高度以及车辆间的位置关系,这样就能够更为精确地表示出汽车所处的地理位置,避免两车间信息传递出现"立交桥情况",不会使汽车做出错误判断,而导致不必要的状况发生。
安装在汽车前部和后部的CCD相机即"盲区探测器",其作用是能够实时观察道路两旁的状况。其中,前部CCD可以在转角处提前探测转弯后的路况,判断有无驶近的车辆;后部CCD可以看到后面车辆行驶情况,判断有无车辆影响本车转弯、超车等操作。
利用GPS和CCD相机判断危险发生并根据危险做出判断操作的过程。首先,判断是否有车辆驶近本车,并且将最危险的接近车辆作为通信对象;其次,通过Ad Hoc无线网络通信,获得本车与目标车的行驶信息,包括速度、位置、刹车扭矩等。根据这些信息,判断目标车的行驶状况是否正常。当监测到的信息显示目标车运行不正常,则两车间互相传递诸如刹车扭矩等的重要信息,并且根据具体情况,实时地通过CCD相机获得两车间的距离信息,在特定情况下,两车MCU控制器均会采取主动或自动刹车,从而避免两车相撞,同时司机也可以通过车内的监视屏来看到这些信息。即使在行驶过程中,出现不同的危险状况,驾驶辅助系统都能够根据从GPS和CCD相机得到的信息,针对不同的行驶状况,做出正确精确的操作。
通信模块
移动Ad Hoc网络由汽车上装载的无线终端相互作用而形成,无需其他有线和无线网络支持。其中,每辆汽车都是移动Ad Hoc网络中的移动节点,而且可以自由地加入或离开网络。移动Ad Hoc网络中没有网络基础设施(如蜂窝网中的基站),所有移动节点分布式运行,具有路由功能,利用一定的协议,使得移动节点自身可以发现和维护其他节点的路由。除适合本驾驶辅助系统的数据信息传输外,还具有一些蜂窝移动网络不具备的优点: (1)可以随时建立网络,在没有其他通信设施的情况下使用,大大节省运营成本; (2)不受固定拓扑结构的限制,具有很强的容错性和鲁棒性,在某些极端恶劣的情况下,即使部分探测汽车出现故障,网络仍能正常运行。 驾驶辅助系统依靠车辆间的状态信息相互传递,监测行车状态,可以保护行车的安全性,包括调节行驶状态,避免恶性碰撞。目前,现有的系统能够警告驾驶者危险状况的来临,但不能自主做出预防措施,而本系统则弥补了这个缺陷。利用Ad Hoc网络传送的信息主要包括两种: (1)定时传输由GPS和CCD相机以及车内部分传感器得到的状态信息,如:车辆的位置、行驶速度、刹车扭矩等。根据研究,这些状态信息应以非常高的频率传递,网络中的每辆车每秒大约传输5~50次。 (2)危险情况的警告信息。与上面定时发送的信息不同,这些警告信息有可能来自通信范围内的通信车辆,节点离得较远,因此需要多跳传输,所以这种信息只有当危险情况出现时才发出。 因此利用移动Ad Hoc网络传输的系统能对车辆行驶状况实施实时动态采集,具有建设成本低、周期短、维护费用低的特点,适合我国智能交通发展的现状。但移动Ad Hoc网络拓扑结构和物理层协议设计、采集信息的处理与其对未来路况预测等问题还有待解决。
控制模块 通过Ad Hoc网络传递过来的车辆信息进入车内整车控制器时,会对所得到的数据进行分析处理。如果分析的结果安全,不做出任何措施;当分析的结果出现警告时,则做出主动预防措施,其过程如下:
整车控制器是汽车控制的核心,它根据输入信号,判断汽车当前状态,并经过一定的控制逻辑和控制算法的判断分析,确定向各子系统发出当前控制信号的量值。速度信号表征当前整车对输出驱动扭矩的需求量,同理,制动踏板信号表示对整车制动扭矩的需求。本文所研究的汽车控制策略采用的是电力辅助控制策略。发动机MCU根据总成控制器发出的发动机油门信号,结合当前的发动机转速,确定出所需供油量和喷油定时,使电喷发动机通过有效组织燃烧向扭矩耦合器输出扭矩。电机驱动系统根据输入的表征电机扭矩大小的电机油门信号,以及电机工作模式信号决定电机的驱动扭矩输出。整车控制器根据驾驶员制动踏板及当前车速计算出所需机械制动扭矩值,以得到机械制动系统的制动指令,与原车相比,车轮制动力分别来自产生摩擦制动的制动系统和产生回馈制动的动力传动系统,增加的回馈制动功能由混合动力及传动系统实现,回馈制动力来自电机的制动力矩,并通过传动系统施加于驱动轮上,而回馈制动的能量则通过传动系统传回电机。这样提高了制动的可靠性,从而增加了驾驶辅助系统的可靠性和安全性。

 ADAS智能驾驶辅助系统
ADAS智能驾驶辅助系统
 汽标委发布《道路车辆先进驾驶辅助系统(ADAS)术语及定义》征求意见稿
汽标委发布《道路车辆先进驾驶辅助系统(ADAS)术语及定义》征求意见稿