结构振动控制 : 主动、半主动和智能控制文献

 采用半主动TMD的建筑结构振动控制研究
采用半主动TMD的建筑结构振动控制研究
采用半主动TMD的建筑结构振动控制研究
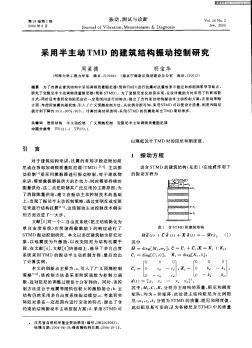
为了改善在建筑结构中采用调频质量阻尼器(简称TMD)进行抗震时抗震效果不稳定和抑制频带窄等缺点,研究了变阻尼半主动调频质量阻尼器(简称STMD)。为了使阻尼变化容易实现,在设计激励力时采用了阶跃函数方式;同时还考虑到变动阻尼应在一定范围内进行的特点,提出了含约束的结构振动半主动控制方案;在控制策略方面,考虑到地震的随机性,引入了广义预测控制方法。从实例分析可知,采用STMD可以使设计质量、刚度和阻尼值分别下降约30%,90%,90%。计算仿真结果表明,采用STMD的抗震效果比TMD要好得多。
 采用半主动TMD的建筑结构振动控制研究
采用半主动TMD的建筑结构振动控制研究
采用半主动TMD的建筑结构振动控制研究
为了改善在建筑结构中采用调频质量阻尼器(简称TMD)进行抗震时抗震效果不稳定和抑制频带窄等缺点,研究了变阻尼半主动调频质量阻尼器(简称STMD)。为了使阻尼变化容易实现,在设计激励力时采用了阶跃函数方式;同时还考虑到变动阻尼应在一定范围内进行的特点,提出了含约束的结构振动半主动控制方案;在控制策略方面,考虑到地震的随机性,引入了广义预测控制方法。从实例分析可知,采用STMD可以使设计质量、刚度和阻尼值分别下降约30%,90%,90%。计算仿真结果表明,采用STMD的抗震效果比TMD要好得多。