机器人机械系统原理理论方法和算法文献

 机械系统柔性建模方法与仿真研究
机械系统柔性建模方法与仿真研究
机械系统柔性建模方法与仿真研究
针对刚体结构的误差影响,将柔性化建模技术应用于减速器传动系统设计。利用ANSYS平台对各零部件进行有限元建模和模态参数计算,通过MNF文件(模态中性文件)替换的方式实现了减速器的柔性化设计,建立了基于ADAMS/View的柔性化减速器虚拟样机仿真模型。利用Step函数拟合了减速器的驱动转速和转矩负载,实现了柔性化减速器动力学仿真,计算和分析了与实际情况更为接近的仿真结果,如输入输出转矩、加速度、动态载荷及3D频谱,为机械传动系统的柔性化设计与精度分析提供了有力参考和依据。
 l六足昆虫机器人机械原理
l六足昆虫机器人机械原理
l六足昆虫机器人机械原理
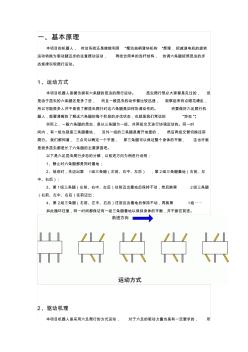
一、基本原理 本项目的机器人, 传动系统还是继续利用 “摆动曲柄滑块机构 ”原理,把减速电机的旋转 运动转换为驱动腿迈步的往复摆动运动, 再结合简单的连杆结构, 协调六条腿按照昆虫的步 态规律实现爬行运动。 1、运动方式 本项目机器人是模仿拥有六条腿的昆虫的爬行运动。 昆虫爬行想必大家都是见过的, 但 是由于昆虫的六条腿还是多了些, 而且一般昆虫的动作都比较迅速, 观察起来有点眼花缭乱, 所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。 而要做好六足爬行机 器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的 “步态”。 实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。同一时 间内,有一组也就是三条腿着地, 另外一组的三条腿是离开地面的, 然后两组交替切换往前 爬行。我们都知道, 三点可以确定一个平面, 即三条腿可以保证整个身体的平衡, 这