机械原理(第二版)成书过程文献

 机械设计基础第二版目录
机械设计基础第二版目录
机械设计基础第二版目录
绪论 第 1 章 机械设计概述 第 2 章 润滑与密封概述 第 3 章 平面机构的结构分析 第 4 章 平面连杆机构 第 5 章 凸轮机构 第 6 章 间歇运动机构 第 7 章 螺纹连接 第 8 章 轴毂连接 第 9 章 带传动 第 10章 链传动 第 11章 齿轮传动 第 12章 蜗杆传动 第 13章 齿轮系 第 14章 机械传动设计 第 15章 机械的调速与平衡 第 16章 轴 第 17章 滚动轴承 第 18章 滑动轴承 第 19章 联轴器、离合器 第 20章 弹簧 目 录 绪论 0.1 机器的组成及特征 0.2课程的内容、性质和任务 0.3 学习方法 复习题与练习题 第 1 章机械设计概述 1.1 机械设计的基本要求 1.2 机械设计的内容与过程 1.3 机械零件的失效形式及设计计算准则 1.4机械零件的接触强度 1.5机械零件的标准化 1.6现代机械设计理论概述 复习题与练习题
 机械制造工艺学第二版参考答案
机械制造工艺学第二版参考答案
机械制造工艺学第二版参考答案
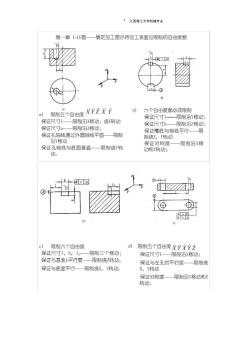
江西理工大学机械专业1 江西理工大学机械专业2 江西理工大学机械专业3 江西理工大学机械专业4 3-1 在车床上用两顶尖装夹工件车削细长轴时,出现图 3-80a、b、 c所示误差是什么原因,分别可采用什么办法来减少或消除? 答: a) 误差原因: 1)由于细长轴工件的刚性差, 在加工过程中因受力变形而使 江西理工大学机械专业5 加工出的工件呈两端细中间粗的鼓形。随着切削力作用点位置变化, 在两端,工件刚度最大,变形最小,切去的金属层厚;中间工件刚度 最小,变形最大,切去的金属层薄。 2)误差复映 减小误差的措施 : 使用中心架或跟刀架, 提高工件的刚度, 比如改为反向进给, 使工件由轴向受压变为轴向受拉。 b) 误差原因: 1)机床的刚性较差。随着切削力作用点位置变化,在两端, 机床变形较大,切去的金属层薄;中间机床变形较小,切去的金属层 厚。因此因工件受力变形而使加工出的