PID调节器文献

 变频器PID调节水泵的应用
变频器PID调节水泵的应用
变频器PID调节水泵的应用
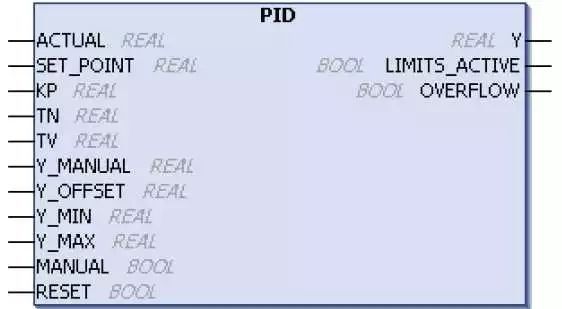
变频器 PID调节水泵的应用 一、现场配置 1、ABB变频器( ACS510)1 台 2、压力传感器(量程 0-16Kg,对应输出 4~20mA)1 个 3、水泵一台 二、控制要求 1、变频器根据比较设定值和压力传感器的值,自动调整输出频率 2、AI1 接调节电位器(设定值) ,AI2 接压力传感器(反馈值) 三、变频器参数设定 1、接线见下图: 2、注意选取电位器时,阻值要在 1K-10K 欧姆之间。 2、3、4 端子接电位器,用作压力 值给定(默认为 0~10V电压信号)。5、6 端子用于连接压力传感器反馈的实际信号(默认 为 0~20mA电流信号)。7、8、9 端子为变频器实时运行数据输出,根据现场需要情况可以 不接。 11、12用导线短接。 10、 14、17号端子直接短接, 13、15、16号端子空着不接。 10 号端子通过一个手动开关与 18号端子连接,作为变频器的起停信号。
 调节阀与调节器配合与PID整定
调节阀与调节器配合与PID整定
调节阀与调节器配合与PID整定
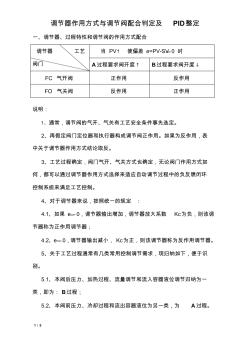
调节器作用方式与调节阀配合判定及 PID整定 1 / 5 一、调节器、过程特性和调节阀的作用方式配合 说明: 1、通常,调节阀的气开、气关有工艺安全条件事先选定。 2、再假定阀门定位器和执行器构成调节阀正作用。如果为反作用,表 中关于调节器作用方式结论取反。 3、工艺过程确定,阀门气开、气关方式也确定,无论阀门作用方式如 何,都可以通过调节器作用方式选择来适应自动调节过程中的负反馈闭环 控制系统来满足工艺控制。 4、对于调节器来说,按照统一的规定 : 4.1、如果 e﹥0,调节器输出增加,调节器放大系数 Kc为负,则该调 节器称为正作用调节器; 4.2、e﹥0,调节器输出减小, Kc为正,则该调节器称为反作用调节器。 5、关于工艺过程通常有几类常用控制调节需求,现归纳如下,便于识 别。 5.1、本阀后压力、加热过程、流量调节和流入容器液位调节归纳为一 类,即为: B过程; 5.2、本阀前