在一些科幻节目也可见,比如有氮气加速推进器
用于推动船艇运动的装置。陆军船艇推进器主要有螺旋桨推进器和喷水推进器两种。
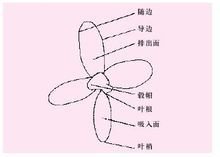
螺旋桨推进器 简称螺旋桨。螺旋桨安装在船艇尾部水线以下的推进轴上,由主机带动推进轴一起转动,将水从桨叶的吸入面吸入,从排出面排出,利用水的反作用力推动船艇前进。螺旋桨分为固定螺距螺旋桨和可调螺距螺旋桨。①固定螺距螺旋桨。由桨毂和桨叶组成。桨叶一般为3~4片(见图1)。桨叶临近桨毂部分称叶根,外端称叶梢,正车运转时在前的一边称导边,在后的一边称随边,螺旋桨盘面向船尾一面称排出面,向船首一面称吸入面。在固定螺距螺旋桨外缘加装一圆形导管,即为导管螺旋桨。导管可提高螺旋桨的推进效率,但倒车性能较差。导管螺旋桨又可分为固定式和可转式。固定式导管螺旋桨使船艇回转直径增大,可转式导管螺旋桨能改善船艇回转性能。②可调螺距螺旋桨。通过桨毂内的曲柄连杆机构带动桨叶转动,在不改变推进轴的转速和运转方向的情况下,改变桨叶的角度,即可改变推进器的推进功率和推进方向。螺旋桨构造简单,工作可靠,效率较高,是船艇的主要推进器。现代船艇的螺旋桨多采用大盘面比、适度侧斜、径向不等螺距和较多桨叶等结构形式,以减小在船尾不均匀伴流场中工作时,可能产生的空泡、剥蚀、噪声和过大的激振力。在一些高速船艇上则采用超空泡翼型螺旋桨。用于全垫升气垫交通艇的空气螺旋桨与固定螺距螺旋桨相似,是利用空气的反作用力推动船艇前进。
喷水推进器 由水泵、吸水管道和喷水管道组成(见图2)。前进时,水泵自船底吸水管道吸进水流,从喷水管道高速喷出,获得水流的反作用力,推动船艇前进。倒航时,将装置在喷水管道口上方的倒车斗放入水中,高速水流进入倒车斗后,将向后方喷射的水流反射成向前的水流,在不改变主机旋转方向的情况下使船艇倒航。喷水推进器具有良好的浅水推进效率和操纵性能,较低的噪声和振动,是浅水船艇采用较多的推进装置。
图1 固定螺距螺旋桨示意图
图2 喷水推进器示意图
矢量推进器
广义上可以指所有采用推力矢量技术的推进器,狭义上一般指飞行器上采用推力矢量技术的推进器。简而言之,推力矢量技术就是通过偏转发动机喷流的方向,从而获得额外操纵力矩的技术。我们知道,作用在飞机上的推力是一个有大小、有方向的量,这种量被称为矢量。然而,一般的飞机上,推力都顺飞机轴线朝前,方向并不能改变,所以我们为了强调这一技术中推力方向可变的特点,就将它称为推力矢量技术。
不采用推力矢量技术的飞机,发动机的喷流都是与飞机的轴线重合的,产生的推力也沿轴线向前,这种情况下发动机的推力只是用于克服飞机所受到的阻力,提供飞机加速的动力。
采用推力矢量技术的飞机,则是通过喷管偏转,利用发动机产生的推力,获得多余的控制力矩,实现飞机的姿态控制。其突出特点是控制力矩与发动机紧密相关,而不受飞机本身姿态的影响。因此,可以保证在飞机作低速、大攻角机动飞行而操纵舵面几近失效时利用推力矢量提供的额外操纵力矩来控制飞机机动。第四代战斗机要求飞机要具有过失速机动能力,即大迎角下的机动能力。推力矢量技术恰恰能提供这一能力,是实现第四代战斗机战术、技术要求的必然选择。
普通飞机的飞行迎角是比较小的,在这种状态下飞机的机翼和尾翼都能够产生足够的升力,保证飞机的正常飞行。当飞机攻角逐渐增大,飞机的尾翼将陷入机翼的低能尾流中,造成尾翼失速,飞机进入尾旋而导致坠毁。这个时候,纵然发动机工作正常,也无法使飞机保持平衡停留在空中。
然而当飞机采用了推力矢量之后,发动机喷管上下偏转,产生的推力不再通过飞机的重心,产生了绕飞机重心的俯仰力距,这时推力就发挥了和飞机操纵面一样的作用。由于推力的产生只与发动机有关系,这样就算飞机的迎角超过了失速迎角,推力仍然能够提供力矩使飞机配平,只要机翼还能产生足够大的升力,飞机就能继续在空中飞行了。而且,通过实验还发现推力偏转之后,不仅推力能产生直接的投影升力,还能通过超环量效应令机翼产生诱导升力,使总的升力提高。
装备了推力矢量技术的战斗机由于具有了过失速机动能力,拥有极大的空中优势,美国用装备了推力矢量技术的X-31验证机与F-18做过模拟空战,结果X-31以1:32的战绩遥遥领先于F-18。
使用推力矢量技术的飞机不仅其机动性大大提高,而且还具有前所未有的短距起落能力,这是因为使用推力矢量技术的飞机的超环量升力和推力在升力方向的分量都有利于减小飞机的离地和接地速度,缩短飞机的滑跑距离。另外,由于推力矢量喷管很容易实现推力反向,飞机在降落之后的制动力也大幅提高,因此着陆滑跑距离更加缩短了。
如果发动机的喷管不仅可以上下偏转,还能够左右偏转,那么推力不仅能够提供飞机的俯仰力矩,还能够提供偏航力矩,这就是全矢量飞机。
推力矢量技术的运用提高了飞机的控制效率,使飞机的气动控制面,例如垂尾和立尾可以大大缩小,从而飞机的重量可以减轻。另外,垂尾和立尾形成的角反射器也因此缩小,飞机的隐身性能也得到了改善。
推力矢量技术是一项综合性很强的技术,它包括推力转向喷管技术和飞机机体/推进/控制系统一体化技术。推力矢量技术的开发和研究需要尖端的航空科技,反映了一个国家的综合国力,目前世界上只有美国和俄罗斯掌握了这一技术,F-22和Su-37就是两国装备了这一先进技术的各自代表机种。

 集成电机泵喷推进器应用于水下机器人探讨
集成电机泵喷推进器应用于水下机器人探讨