现代可编程序控制器网络通信技术基本信息文献

 可编程序控制器网络通讯及其程序设计研究
可编程序控制器网络通讯及其程序设计研究
可编程序控制器网络通讯及其程序设计研究
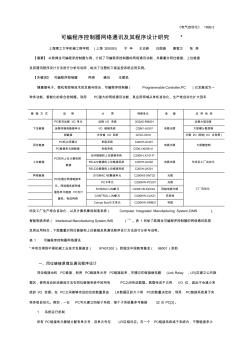
《电气自动化》 1999.3 可编程序控制器网络通讯及其程序设计研究 * 上海理工大学机械工程学院 (上海 200093) 宁 华 王志新 白国振 唐智卫 张 奔 【摘要】 以欧姆龙可编程序控制器为例,介绍了可编程序控制器的网络通讯功能,并着重对同位链接、上位链接 及其通讯程序设计方法进行分析与说明,给出了注塑机三级监控系统应用实例。 【关键词】 可编程序控制器 网络 通讯 注塑机 随着微电子、微机和控制技术的发展与综合,可编程序控制器( Programmable Controller,PC )已发展成为一 种多功能、智能化的综合控制器。利用 PC强大的网络通讯功能,其应用领域从单机自动化、生产线自动化扩大到车 间及工厂生产综合自动化,以及计算机集成制造系统( Computer Integrated Manufacturing System,CIMS )、 链 接 方 式
 可编程序控制器实训报告
可编程序控制器实训报告
可编程序控制器实训报告
福州大学至诚学院 本科生课程设计 题 目: 可编程序控制器实训 姓 名: 学 号: 系 别: 电气工程系 专 业: 电气工程及其自动化 年 级: 09级 指导教师: 2011年 12月 26 日~2012年 1 月 6日 目 录 《可编程序控制器》课程设计任务书 ,,,,,,,,,,,,,,, 2 任务一:全自动洗衣机的 PLC控制 1、 系统描述及控制要求 ,,,,,,,,,,,,,,,,,,,,,,,,,, 4 2、 设计方案 ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 4 3、 I/O 分配表 ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 6 4、 外部接线图 ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 7 5、 梯形图 ,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,, 7 6、 系统调试 ,,,,,,,