坐标转换计算机公布时间文献

 施工坐标转换大地坐标,大地坐标转换施工坐标
施工坐标转换大地坐标,大地坐标转换施工坐标
施工坐标转换大地坐标,大地坐标转换施工坐标
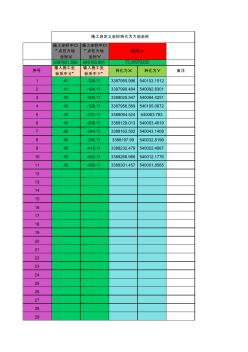
施工坐标中O ′点在大地 坐标X 施工坐标中O ′点在大地 坐标Y 3387821.509 540100.601 序号 输入施工坐 标系中X′ 输入施工坐 标系中Y′ 转化为X 转化为Y 备注 1 41 -128.11 3387955.996 540103.1512 2 41 -164.11 3387990.484 540092.8301 3 43 -200.11 3388025.547 540084.4251 4 43 -128.11 3387956.569 540105.0672 5 43 -272.11 3388094.524 540063.783 6 43 -308.11 3388129.013 540053.4619 7 43 -344.11 3388163.502 540043.1408 8 43 -380.11 3388197.99 540032.8198 9 43 -416
 GPS测量中的坐标转换
GPS测量中的坐标转换
GPS测量中的坐标转换
GPS测量中坐标系变换与基准变换:同一基准面下的坐标转换,不同基准面下的坐标转换;GPS数据坐标转换实现。