自动控制理论实践教程文献

 自考自动控制理论(二)知识要点总结
自考自动控制理论(二)知识要点总结
自考自动控制理论(二)知识要点总结
. word 范文 第一章 概论 第一节 自动控制和自动控制系统的基本概念 1.自动控制:应用控制装置自动的、有目的地控制或调节机器设备或生产过程,使之按照人们规定的或者 是希望的性能指标运行。 2.常规控制器的组成:⑴定值元件。⑵比较元件。⑶放大元件。⑷反馈元件。 第二节 自动控制系统的分类 一、按自动控制系统是否形成闭合回路分类: 1.开环控制系统:一个控制系统,如果在其控制器的输入信号中不包含受控对象输出端的被控量的反馈信 号,则称为开环控制系统。 2.闭环控制系统:一个控制系统,如果在其控制器的输入信号中包含来自受控对象输出端的被控量的反馈 信号,则称为闭环控制系统,或称为反馈控制系统。 二、按信号的结构特点分类: 1.反馈控制系统:是根据被控量和给定值的偏差进行调节的,最后使系统消除偏差,达到被控量等于给定 值的目的。 2. 前馈控制系统。 3. 前馈—反馈复合控制系统。 三、
 自动控制理论第一章作业及答案
自动控制理论第一章作业及答案
自动控制理论第一章作业及答案
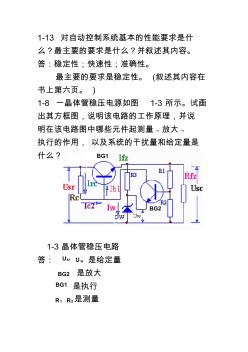
1-13 对自动控制系统基本的性能要求是什 么?最主要的要求是什么?并叙述其内容。 答:稳定性;快速性;准确性。 最主要的要求是稳定性。 (叙述其内容在 书上第六页。 ) 1-8 一晶体管稳压电源如图 1-3 所示。试画 出其方框图,说明该电路的工作原理,并说 明在该电路图中哪些元件起测量﹑放大﹑ 执行的作用, 以及系统的干扰量和给定量是 什么? 1-3 晶体管稳压电路 答: 是给定量 是放大 是执行 是测量 BG1 BG2 R1 R2 BG2 BG1 Usr U w 因为: (当输出电压 Usc 下降的时候,通过 R1 、R2组成的分压电路的作 用,BG2的基极电位 Ub2也下降了。由于基准电压 UW 使 BG2的发射极电位保 持不变,Ubc2 =Ub2一 UW随之减小。于是 BG2集电极电流 Ic2 减小,Uc2增高, 即 BG1的基极电位 Ub1增高,使 Icl 增加,管压