指示函数
指示函数或示性函数(indicator function)数学中,指示函数是定义在某集合X上的函数,表示其中有哪些元素属于某一子集A。指示函数有时候也称为特征函...
-
选择特殊符号
选择搜索类型
请输入搜索
指示函数或示性函数(indicator function)数学中,指示函数是定义在某集合X上的函数,表示其中有哪些元素属于某一子集A。指示函数有时候也称为特征函...
基本定义
指示函数(indicator function)
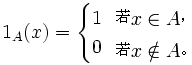
数学中,指示函数是定义在某集合X上的函数,表示其中有哪些元素属于某一子集A。
指示函数有时候也称为特征函数。现在已经少用这一称呼。概率论有另一意思迥异的特征函数。
集X的子集A的特征函数是函数
,定义为
A的指示函数也记作XA(x)或IA(x)。


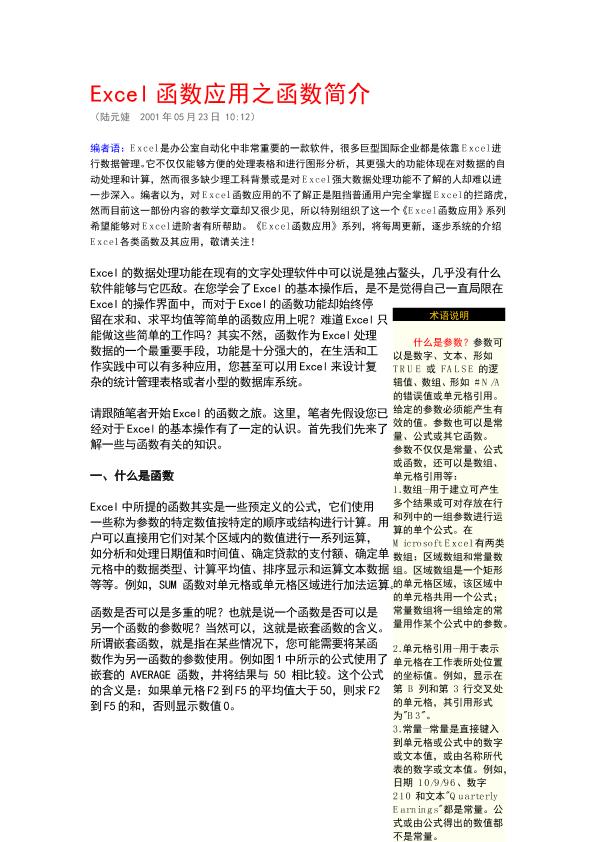 Excel函数应用之函数简介
Excel函数应用之函数简介
Excel函数应用之函数简介
Excel函数应用之函数简介

 矩阵函数和函数矩阵
矩阵函数和函数矩阵
矩阵函数和函数矩阵
矩阵函数求导 首先要区分两个概念:矩阵函数和函数矩阵 (1) 函数矩阵 ,简单地说就是多个一般函数的阵列, 包括单变量和多变量函数。 函数矩阵的求导和积分是作用在各个矩阵元素上,没有更多的规则。 单变量函数矩阵的微分与积分 考虑实变量 t 的实函数矩阵 ( )( ) ( )ij m nX t x t ×= ,所有分量函数 ( )ijx t 定义域相同。 定义函数矩阵的微分与积分 0 0 ( ) ( ) , ( ) ( ) . t t ij ijt t d d X t x t X d x d dx dx τ τ τ τ ? ? ? ??? ???= =? ??? ?? ?? ? ?? ?∫ ∫ 函数矩阵的微分有以下性质: (1) ( )( ) ( ) ( ) ( )d d dX t Y t X t Y t dt dt dt + = + ; (2) ( ) ( ) ( )( ) ( ) ( )
最有名的应力函数是弹性力学平面问题中的艾里应力函数。如果没有体力,平面中的三个应力分量σxx、σyy、τxy满足下列方程:
根据方程(1),可将应力分量用一个函数φ(x,y)表示为:
φ便是艾里应力函数。对于均匀和各向同性的物体,φ是一个双调和函数,即它满足下列双调和方程:
ΔΔφ=0, (3)
式中Δ是平面的拉普拉斯算符。引入φ后,平面问题原来的8个未知函数(两个位移分量、三个应变分量和三个应力分量σxx、σyy、τxy就归结为一个函数φ。这对求解具体问题很有好处。
在弹性柱体的扭转问题中,剪应力分量τxz、τyz满足下列平衡方程:
据此可将τxz、τyz用一个函数Ψ(x,y)表示为:
Ψ称为普朗特应力函数。对于均匀和各向同性的柱体,Ψ满足下列方程:
ΔΨ=-2Gθ, (6)
式中G为材料的剪切模量(见材料的力学性能);θ为单位长度的扭转角。
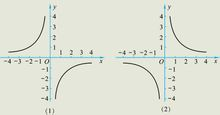
当k>0时,图像分别位于第一、三象限,每一个象限内,从左往右,y随x的增大而减小;
当k<0时,图像分别位于第二、四象限,每一个象限内,从左往右,y随x的增大而增大。
k>0时,函数在x<0上同为减函数、在x>0上同为减函数;k<0时,函数在x<0上为增函数、在x>0上同为增函数。
因为在
(k≠0)中,x不能为0,y也不能为0,所以反比例函数的图像不可能与x轴相交,也不可能与y轴相交,只能无限接近x轴,y轴。
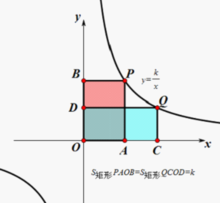
在一个反比例函数图像上任取两点,过原点分别作x轴,y 轴的平行线,与坐标轴围成的矩形面积为|k| ,
反比例函数上一点 向x 、y 轴分别作垂线,分别交于y轴和x轴,则QOWM的面积为k|,则连接该矩形的对角线即连接OM,则RT△OMQ的面积=½|k|
反比例函数的图像既是轴对称图形,又是中心对称图形,它有两条对称轴 y=±x(即第一三,二四象限角平分线),对称中心是坐标原点。
反比例函数图像不与x轴和y轴相交的渐近线为:x轴与y轴。
k值相等的反比例函数图像重合,k值不相等的反比例函数图像永不相交。
|k|越大,反比例函数的图像离坐标轴的距离越远。
反比例函数图像是中心对称图形,对称中心是原点;反比例函数的图像也是轴对称图形,其对称轴为y=x和y=-x;反比例函数图像上的点关于坐标原点对称。
图像关于原点对称。若设正比例函数y=mx与反比例函数 交于A、B两点(m、n同号),那么A B两点关于原点对称。
反比例函数关于正比例函数y=±x轴对称,并且关于原点中心对称。
与正比例函数交点
设在平面内有反比例函数 和一次函数y=mx+n,要使它们有公共交点,则反比例减去一次函数为零 。
在求解弹性力学的空间问题时,也可以用六个应力函数代替原来的六个应力分量,但好处不多。所以,一般多采用各种位移函数。对于均匀和各向同性弹性体,位移分量u1、u2、u3满足下列平衡方程:
式中Δ是空间中的拉普拉斯算符;ν为材料的泊松比;G为剪切模量;fi为体力分量。方程(7)的解可以表达成多种形式。一种形式为:
式中ψ1、ψ2、ψ3、
函数ψ1、ψ2、ψ3、
方程(7)还有另一种形式的解,即
式中Fi满足下列方程:
函数F1、F2、F3称为布森涅斯克-索米利亚纳-伽辽金位移函数。对于回转体的轴对称问题,公式(10)可作许多简化。取对称轴为z轴(x3轴),记r为所考虑点到z轴的距离,并记位移在r、z轴上的投影分别为u、w。若┃1=┃2=0,可取F1=F2=0,F3=F(r,z)。这样由公式(10)可得到:
式中,即柱坐标中的拉普拉斯算符;F满足下列方程:
公式(12)中的函数F称为乐甫位移函数。 在求解轴对称问题时,经常利用公式(12)。
在f1=f2=0的情况下,即使不是轴对称问题,方程(7)的解也可用一组位移函数F、f表示如下:
式中F、f满足下列方程:
这组位移函数特别适用于求解无限体、半无限体和厚板等问题。