重力归算空间改正
空间改正是将海拔高程为h的重力点P上的重力值g归算为大地水准面上P0点的重力值g0(图1)。归算时不考虑地球表面和大地水准面之间的质量,只考虑高程h对重力的影响。设重力在没有质量的自由空间的垂直梯度为∂g/∂h,则把地面上的重力值g归算为大地水准面上P0点的重力值g0的空间改正为:
由于实际重力垂直梯度并不知道,通常用φ=45°处的正常重力垂直梯度∂g/∂h=-0.3086mGal/m,于是:
式中h以m为单位。
将地面点的重力观测值g加上空间改正△1g后,再与正常椭球面上的正常重力值γ,相减,得:
称为空间重力异常,它的数值与地面重力异常相差极其微小,但两者概念不同。
重力归算布格改正
空间改正没有顾及地面和大地水准面之间的质量对重力的影响。这一层间质量对地面点P的重力影响的改正,称为层间改正。现在要把这一层间质量去掉;没有这一层质量,地面点的重力值显然要减小,故层间改正为负值。
现在推导地面点P的水平面与大地水准面之间的质量对P点的引力。因为远离P点的地区对P点的引力影响不大,而在P点的邻近,地球的曲率可不考虑。因此,可以假设这一质量层不是球层,而是密度为δ的均质圆柱层(图2)。在此圆柱层中取一质元dm,它对P点的引力在重力方向上的分量为:
;对于厚度为h、半径为a的整个圆柱体的质量来说,它对P点的引力为:
在 时:
地球表面上的重力值,可以近似地看成是一个半径为R的均质圆球的引力,即:
式中 为地球的平均密度,由此得:
取g=980 000mGal,R=6371km, =5.52 g/cm3,则得Fz=0.0418hδ。由于层间改正是去掉这一部分引力。故:
式中δ以g/cm3为单位,h以m为单位,Δ2g以mGal为单位。δ通常采用2.67g/cm3,则层间改正为:
通常将层间改正和空间改正之和称为布格改正,即:
布格异常为 :
重力归算局部地形改正
在进行布格改正时,认为计算点P的周围是平坦的,且物质的密度相同。实际情况并非如此,特别是在丘陵区和山区。设P点周围的地形分布如图3所示,若视该点周围地形是平坦的,只加层间改正,则质量m1和m3对P点的引力就没有去掉,而原来不存在的质量m2和m4却被认为对P点有引力,并把它们扣除了。这样就必然引起误差。为此,必须先扣除质量m1和m3的引力,并补上质量m2和m4的引力,然后再加层间改正。这种去掉高出P点水平面的质量和补上P点水平面之下缺少的质量所应加入的改正,称为局部地形改正,以Δ3g表示。由于高出P点水平面的质量对P点的引力(例如F1)向上,它使P点的重力减小,而去掉这些质量应使P点的重力增大;P点水平面下没有质量的地方要填进质量,它对P的引力(例如F4)向下,使重力增大。所以不论周围地形是高出P或低于P,局部地形改正总是正值。
如图4,以计算点P为中心,以不同的半径ri作圆柱面,将周围地形质量划分为圆环柱体。又过P作一些辐射线,将每个圆环柱体等分为n块梯形柱体。第i个圆环第k个梯形柱体引起的局部地形改正为:
式中Ak和Ak 1为该梯形两侧辐射线的方位角,而:
ri和ri 1为梯形柱体的内、外半径,hik为该梯形柱体相对于计算点P的平均高差。积分上式得:
ni为第 i 环等分的梯形数。总的局部地形改正为:
将局部地形改正与布格异常相加,即得“精化的”布格异常。局部地形改正在平坦地区可达0.1~1.0mGal,在高山地区则可达10~100mGal。
如果地面观测的重力值g只加入空间改正和局部地形改正,再减去正常椭球面上相应的正常重力值,则得出法耶异常 :
重力归算地壳均衡改正
现有三种地壳均衡模型,其中以普拉特-海福德模型比较简单,适用于重力归算。这一模型认为,海面以下某一深度D处有一等压面,称为抵偿面;若将地壳分割成许多截面相等的柱体(图5),各柱体的质量是相等的。各柱体海面以上的部分,物质密度是地壳平均密度δ;海面以下的部分,物质密度小于δ,假设为 称为抵偿密度。
容易看出,对观测重力值加入均衡改正,就是求出各个柱体的抵偿密度为δ0的质量对计算点的引力;因此,只要在第i个圆环第k个梯形柱体引起的局部地形改正公式中将z的积分限从0到hik换为从h到h D,h为计算点P的高程。将地壳的平均密度δ换成抵偿密度δ0,则可直接得出大陆地区的均衡改正公式:
式中ni为第 i 环等分的梯形数;hik为第 i 环第 k 个梯形柱体高出海面的平均高程。
对于大陆来说,均衡改正是将海面以外的质量移到海面至抵偿面之间,使之成为均质厚层,所以应该在观测重力值中加上它。对于海洋地区来说,均衡改正计算公式相同,仅抵偿密度不同。
观测重力值加入空间改正、局部地形改正、层间改正和均衡改正,再减去正常椭球面上相应的正常重力值,即得均衡异常 :

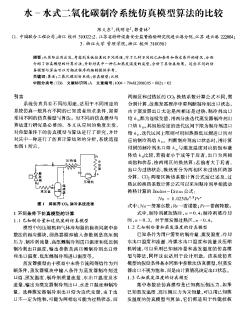 水-水式二氧化碳制冷系统仿真模型算法的比较
水-水式二氧化碳制冷系统仿真模型算法的比较
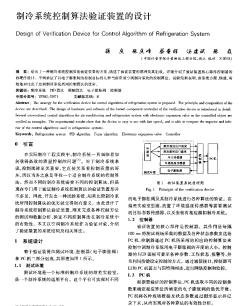 制冷系统控制算法验证装置的设计
制冷系统控制算法验证装置的设计