智能控制基础理论及应用内容简介文献

 智能控制理论基础实验报告
智能控制理论基础实验报告
智能控制理论基础实验报告
1 北京科技大学 智能控制理论基础实验报告 学 院 专业班级 姓 名 学 号 指导教师 成 绩 2014 年 4 月 17日 2 实验一 采用 SIMULINK 的系统仿真 一、实验目的及要求: 1.熟悉 SIMULINK 工作环境及特点 2.掌握线性系统仿真常用基本模块的用法 3.掌握 SIMULINK 的建模与仿真方法 二、实验内容: 1. 了解 SIMULINK 模块库中各子模块基本功能 微分 积分 积分步长延时 状态空间模型 传递函数模型 传输延迟 可变传输延迟 零极点模型 3 直接查询表 函数功能块 MATLAB 函数 S函数(系统函数) 绝对值 点乘 增益 逻辑运算 符号函数 相加点 死区特性 手动开关 继电器特性 饱和特性 开关模块 信号分离模块 信号复合模块 输出端口 示波器模块 输出仿真数据到文件 输出仿真数据到工作空间 4 通过实验熟悉以上模块的使用。 2.
 智能控制理论结课论文
智能控制理论结课论文
智能控制理论结课论文
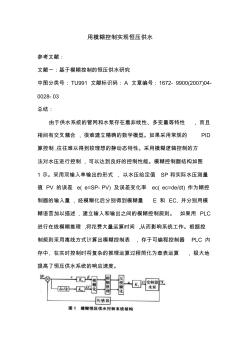
用模糊控制实现恒压供水 参考文献: 文献一:基于模糊控制的恒压供水研究 中图分类号 : TU991 文献标识码 : A 文章编号 : 1672- 9900(2007)04- 0028- 03 总结: 由于供水系统的管网和水泵存在着非线性、多变量等特性 , 而且 相间有交叉耦合 , 很难建立精确的数学模型。如果采用常规的 PID 算控制 ,往往难以得到较理想的静动态特性。采用模糊逻辑控制的方 法对水压进行控制 , 可以达到良好的控制性能。模糊控制器结构如图 1 示。采用双输入单输出的形式 , 以水压给定值 SP 和实际水压测量 值 PV 的误差 e( e=SP- PV) 及误差变化率 ec( ec=de/dt) 作为糊控 制器的输入量 , 经模糊化后分别得到模糊量 E 和 EC, 并分别用模 糊语言加以描述 , 建立输入和输出之间的模糊控制规则。 如果用 PLC 进行在线模糊推理 ,