
激光位移传感器采用激光三角反射原理,测量光斑是一个点,俗称点激光。激光轮廓扫描仪本质上讲,测量原理也是三角反射式的,只不过成像的CCD是一组,测量光斑是一条线,所以俗称线激光。点激光的测量精度要高,但是如果要测大面积被测物体的所有形貌,效率会低,因为要一个点一个点测。而线激光可以面扫描,快速形成3D轮廓,但是精度会下降。具体选哪款要看实际测量任务的要求了。
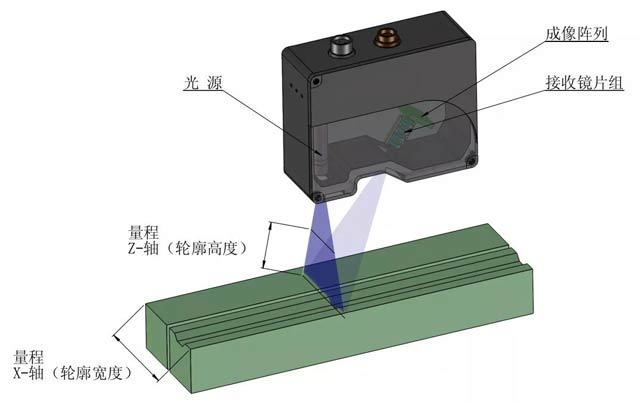
激光位移传感器和激光轮廓传感器都是基于激光三角原理实现测量的传感器。激光位移传感器发出的点激光,测量的是一维位移;而激光轮廓传感器发出的是线激光,测量的二维轮廓形状;因此,二者存在明显的差异与适应范围。
传感器作为物联网的基础,是支撑物联网运行的关键设备。目前物联网技术在共享单车中大量的应用,也将集中于虚拟车位中传感器的投入。这些由传感器采集到的数据将向管理部门和共享单车企业开放。这些数据不仅可以用于管理共享单车,还可以反映该区域的实时交通状况等。当电子围栏逐渐覆盖全国,一个全国联网的“共享传感器”产业也即将诞生。目前也有许多国外的公共机构开始建立交通领域开放数据门户。随着我国城市交通的飞速发展,这些实况数据将为有关部门解决交通安全状况提供巨大的便利,但同时,这些数据也涉及到国家安全,而传感器网络的多数应用都面临严峻的安全问题。因此,首先要做的就是提高传感器的国产化程度,降低安全风险。




