GPS测量路桥施工原理基本原理文献

 振动测量的基本原理
振动测量的基本原理
振动测量的基本原理
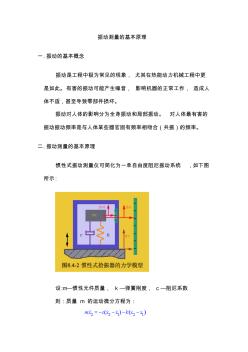
振动测量的基本原理 一 .振动的基本概念 振动是工程中极为常见的现象, 尤其在热能动力机械工程中更 是如此。有害的振动可能产生噪音, 影响机器的正常工作, 造成人 体不适,甚至导致零部件损坏。 振动对人体的影响分为全身振动和局部振动。 对人体最有害的 振动振动频率是与人体某些器官固有频率相吻合(共振)的频率。 二 .振动测量的基本原理 惯性式振动测量仪可简化为一单自由度阻尼振动系统 ,如下图 所示 : 设 :m—惯性元件质量, k —弹簧刚度, c —阻尼系数 则:质量 m 的运动微分方程为: 考虑相对运动: 则有 : 令 : 那么 : 解得稳态受迫振动为 : 其中 : 讨论 : ①当 时: , , 相对运动的振幅 A* 与振动物体 振动加速度的振幅成正比。可作加速度传感器。 ②当 时 :
 转轴扭振测量基本原理.
转轴扭振测量基本原理.
转轴扭振测量基本原理.
转轴扭振测量基本原理 1/3 转轴扭振测量基本原理 1 转轴扭振测试基本原理 [1] 图 1 转轴发生扭振时的角速度变化图 [1] 轴系扭振是在轴系的旋转过程中同时发生的运动现象。轴系正常稳定运行无扭振时,其按某一角速度 0ω回转。当轴系出现扭振时,会在轴截面上相应产生往复扭转变形值弧长 ' ''B B 或扭角 ? ,此时轴系的回 转角速度因扭振引起的交变角速度 ωΔ 而发生了变化,其瞬时角速度为 0ω ω+Δ ,如图 1所示。 按扭振信号的拾取方式分,扭振测量方法主要有两大类,即接触测量法和非接触测量法。接触测量法 是将传感器 (应变片等 )安装在轴上,测量信号经过集流环或者无线电方式传给二次仪表。非接触测量一般 采用“测齿法” ,即利用轴上的齿轮或其他等分结构,由磁电式、涡流式或光电式非接触传感器感受扭振 引起的不均匀脉冲信号,通过二次仪表的解调处理后达到测量扭振的目的。 图 2 角

