多电机冗余系统整体建模及容错控制策略的研究项目摘要文献

 多电机同步联动系统的动力学分析与建模
多电机同步联动系统的动力学分析与建模
多电机同步联动系统的动力学分析与建模
多电机同步联动系统的动力学分析与建模
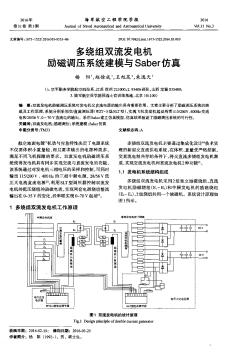 多绕组双流发电机励磁调压系统建模与Saber仿真
多绕组双流发电机励磁调压系统建模与Saber仿真
多绕组双流发电机励磁调压系统建模与Saber仿真
双流发电机励磁调压系统对发电机交直流电源的输出具有重要作用。文章主要分析了励磁调压系统的组成及工作原理,系统分别采用交/直流调压器(WZT-3型/SLT型),实现飞机发动机起动所需115/200V、400Hz交流电和28/56 V、0~70 V直流电的输出。采用Saber建立仿真模型,仿真结果验证了励磁调压系统的可行性。