二自由度超声波电机简介文献

 超声波电机测试电源设计及应用
超声波电机测试电源设计及应用
超声波电机测试电源设计及应用
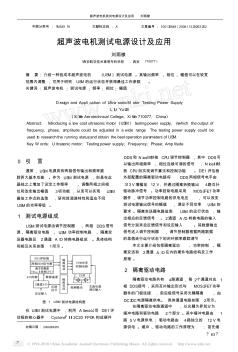
超声波电机测试电源设计及应用 刘雨棣 中图分类号 : TM359 19 文献标志码 : A 文章编号 : 1001 26848 ( 2008 ) 1220063 202 超声波电机测试电源设计及应用 刘雨棣 (西安航空技术高等专科学校 , 西安 710077 ) 摘 要 : 介绍一种低成本超声波电机 (USM ) 测试电源 。其输出频率 、相位 、幅值可以在较宽 范围内调整 , 可用于研究 USM 的运行状态并获得最佳工作参数 。 关键词 : 超声波电机 ; 测试电源 ; 频率 ; 相位 ; 幅值 D esign and Appli cation of Ultra sonicM otor Testing Power Supply L IU Yu 2di ( Xiπan Aerotechnical College, Xiπan 710077, China) A
 压电陶瓷在超声波电机中的应用研究
压电陶瓷在超声波电机中的应用研究
压电陶瓷在超声波电机中的应用研究
武汉理工大学 硕士学位论文 压电陶瓷在超声波电机中的应用研究 姓名:郑惠清 申请学位级别:硕士 专业:材料学 指导教师:周静 20100401 压电陶瓷在超声波电机中的应用研究 作者: 郑惠清 学位授予单位: 武汉理工大学 本文链接: http://d.g.wanfangdata.com.cn/Thesis_Y1680468.aspx 授权使用:江苏大学图书馆(wfhyjs04) ,授权号:125943f0-6328-46b2-9e01-9e2e00e11140 下载时间:2010年11月14日