防碰撞算法FSA的各种改进算法文献

 群塔作业防碰撞办法
群塔作业防碰撞办法
群塔作业防碰撞办法
目录 一、 工程概况 .................................................... 错误 ! 未指定书签。 二、 建筑概况 .................................................... 错误 ! 未指定书签。 三、 编制目的和依据 .............................................. 错误 ! 未指定书签。 四、 塔机选择及平面布置 .......................................... 错误 ! 未指定书签。 五、 多机同时作业防碰撞的运行原则和措施 .......................... 错误 ! 未指定书签。 六、 多机同时作业防碰撞安全措施 .................................. 错
 建筑工程中各种构件的算法
建筑工程中各种构件的算法
建筑工程中各种构件的算法
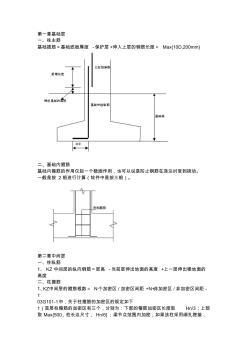
第一章基础层 一、柱主筋 基础插筋=基础底板厚度 -保护层 +伸入上层的钢筋长度+ Max{10D,200mm} 二、基础内箍筋 基础内箍筋的作用仅起一个稳固作用,也可以说是防止钢筋在浇注时受到挠动。 一般是按 2根进行计算(软件中是按三根)。 第二章中间层 一、柱纵筋 1、 KZ 中间层的纵向钢筋=层高 -当前层伸出地面的高度 +上一层伸出楼地面的 高度 二、柱箍筋 1、KZ中间层的箍筋根数= N个加密区 /加密区间距 +N+非加密区 /非加密区间距- 1 03G101-1中,关于柱箍筋的加密区的规定如下 1)首层柱箍筋的加密区有三个,分别为:下部的箍筋加密区长度取 Hn/3;上部 取 Max{500,柱长边尺寸, Hn/6};梁节点范围内加密;如果该柱采用绑扎搭接, 那么搭接范围内同时需要加密。 2)首层以上柱箍筋分别为:上、下部的箍筋加密区长度均取 Max{500,柱长边 尺