锅炉跟踪方式文献

 锅炉房连续供暖方式运行分析
锅炉房连续供暖方式运行分析
锅炉房连续供暖方式运行分析
锅炉房连续供暖方式运行分析——文章对连续供暖方式,以及连续供暖能提高锅炉能效指标,降低煤耗、电耗等优越性和使用条件作了简要介绍。
 锅炉-换热站和供热运行方式的选择
锅炉-换热站和供热运行方式的选择
锅炉-换热站和供热运行方式的选择
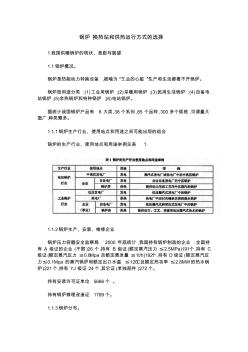
锅炉 换热站和供热运行方式的选择 1.我国供暖锅炉的现状、差距与展望 1.1锅炉概况。 锅炉是热能动力转换设备 ,被喻为“工业的心脏 ”生产和生活都离不开锅炉。 锅炉按用途分类 :(1)工业用锅炉 ;(2)采暖用锅炉 ;(3)民用生活锅炉 ;(4)自备电 站锅炉 ;(5)余热锅炉和特种锅炉 ;(6)电站锅炉。 据统计我国锅炉产品有 8 大类 ,38个系列 ,85 个品种 ,300多个规格 ,可谓量大 面广 ,种类繁多。 1.1.1锅炉生产行业、使用地点和用途之间可能出现的组合 锅炉的生产行业、使用地点和用途举例见表 1. 1.1.2锅炉生产、安装、维修企业 锅炉压力容器安全监察局 2000 年底统计 ,我国持有锅炉制造的企业 :全国持 有 A 级证的企业 (不限 )26 个 ,持有 B 级证 (额定蒸汽压力 ≤2.5MPa)191 个,持有 C 级证 (额定蒸汽压力 ≤0.8 Mpa 且