目标跟踪误差文献

 一种快速人脸目标检测和跟踪算法
一种快速人脸目标检测和跟踪算法
一种快速人脸目标检测和跟踪算法
以人脸为运动目标,利用图像的YUV模型和颜色检测算法在小范围内搜索,即时获得人脸的模板图像.在对序列图像进行目标搜索时,将金字塔方法和序贯相似匹配方法相结合,并采用粗精结合的两步匹配算法,获得运动目标的准确轨迹.实验证明,与传统的模板匹配算法相比,该算法的计算量大大降低,较大程度地提高了运动目标检测的速度.
 实验项目允许总误差
实验项目允许总误差
实验项目允许总误差
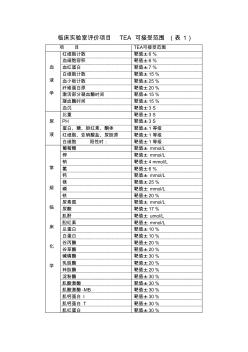
临床实验室评价项目 TEA 可接受范围 (表 1) 项 目 TEA可接受范围 血 液 学 红细胞计数 靶值±6 % 血细胞容积 靶值±6 % 血红蛋白 靶值±7 % 白细胞计数 靶值±15 % 血小板计数 靶值±25 % 纤维蛋白原 靶值±20 % 激活部分凝血酶时间 靶值±15 % 凝血酶时间 靶值±15 % 血沉 靶值±3 S 尿 液 比重 靶值±3 S PH 靶值±3 S 蛋白、糖、胆红素、酮体 靶值±1等级 红细胞、亚硝酸盐、尿胆原 靶值±1等级 白细胞 阳性时: 靶值±1等级 常 规 临 床 化 学 葡萄糖 靶值± mmol/L 钾 靶值± mmol/L 钠 靶值±4 mmol/L 氯 靶值±6 % 钙 靶值± mmol/L 镁 靶值±25 % 磷 靶值± mmol/L 铁 靶值±20 % 尿素氮 靶值± mmol/L 尿酸 靶值±17 % 肌酐 靶值± umol/L