速度环运算文献

 运算放大器16个基本运算电路
运算放大器16个基本运算电路
运算放大器16个基本运算电路
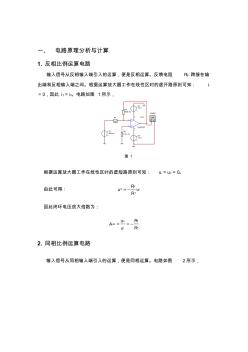
一、 电路原理分析与计算 1. 反相比例运算电路 输入信号从反相输入端引入的运算,便是反相运算。反馈电阻 RF 跨接在输 出端和反相输入端之间。根据运算放大器工作在线性区时的虚开路原则可知: i- =0,因此 i1= i f。电路如图 1所示, R1 10kΩ V1 500mV U1A TL082CD 3 2 4 8 1 R2 9.1k Ω RF 100kΩ V2 12 V V3 12 V XMM1 图 1 根据运算放大器工作在线性区时的虚短路原则可知: u-=u+=0。 由此可得: 0 1 f i R u u R 因此闭环电压放大倍数为: 1 o f uo i u R A u R 2. 同相比例运算电路 输入信号从同相输入端引入的运算,便是同相运算。电路如图 2所示, U1A TL082CD 3 2 4 8 1 R2 10kΩ RF 10kΩ V2 12 V V3 12 V X
 第2章MATLAB数据及其运算
第2章MATLAB数据及其运算
第2章MATLAB数据及其运算
第2章MATLAB数据及其运算