土和沥青闭环试验系统主要功能文献

 电梯主要功能检查试验记录
电梯主要功能检查试验记录
电梯主要功能检查试验记录
编 号 日 期 序 1 2 3 4 5 6 安装单位 专业技术负责人: 年 月 检查 项目专业质检员: 专业监理工程师: 应采用警铃、对讲系统、外部电话 使空载轿厢运行最近层站后,消除登记信号 在开锁区,断电后,手扒开门的力不大于 300N 备用电源将电梯就近平层开门 按产品设计程序试验 专业工长(施工员) 按关门按钮,门不经延时立即关门 在电梯未起动前,按开门按钮,门打开 电梯完成全部指令后,自动返基站 司机状态,按直驶钮后,厅外召唤不能截车 电梯故障停在层间时,自动慢速就近平层 满载时截车功能取消;超载时不能运行 按先人为主原则,自动确定运行方向 有多个选层指令时,电梯按顺序逐一停靠 记忆厅外全部召唤信号,按顺序停靠应答 全部顺向指令完成后,自动应答反向指令 完成最后指令在门关闭前轿内优先登记定向 完成全部指令后,电梯自动关门,时间 4~10s 门机断电手动开门 紧急电源
 电梯主要功能检查试验记录表
电梯主要功能检查试验记录表
电梯主要功能检查试验记录表
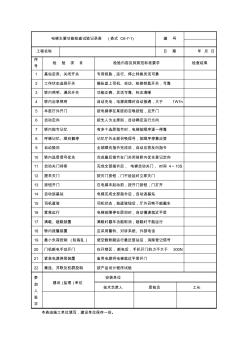
电梯主要功能检查试验记录表 (表式 C6-7-1) 编 号 工程名称 日 期 年 月 日 序 号 检 验 项 目 检验内容及其规范标准要求 检查结果 1 基站启用、关闭开关 专用钥匙,运行、停止转换灵活可靠 2 工作状态选择开关 操纵盘上司机、自动、检修钥匙开关,可靠 3 轿内照明、通风开关 功能正确、灵活可靠、标志清晰 4 轿内应急照明 自动充电,电源故障时自动接通,大于 1W1h 5 本层厅外开门 按电梯停在某层的召唤按钮,应开门 6 自动定向 按先人为主原则,自动确定运行方向 7 轿内指令记忆 有多个选层指令时,电梯按顺序逐一停靠 8 呼梯记忆、顺向截停 记忆厅外全部召唤信号,按顺序停靠应答 9 自动换向 全部顺向指令完成后,自动应答反向指令 10 轿内选层信号优先 完成最后指令在门关闭前轿内优先登记定向 11 自动关门待客 完成全部指令后, 电梯自动关门, 时间 4~10S 1