一种匹配多种直流无刷电机驱动程序的控制方法专利目的
《一种匹配多种直流无刷电机驱动程序的控制方法》的目的是提供一种能够提高变频控制板标准化、模块化的检测方法,使一种变频控制板通过自识别、自适应可以匹配不同的直流无刷电机。
《一种匹配多种直流无刷电机驱动程序的控制方法》的另一目的是提供具有上述变频控制板的电器 。
一种匹配多种直流无刷电机驱动程序的控制方法技术方案
为达到上述目的,《一种匹配多种直流无刷电机驱动程序的控制方法》采用的技术方案是:一种匹配多种直流无刷电机驱动程序的控制方法,其特征在于:在变频控制板中预置多种直流无刷电机驱动程序,通电后所述变频控制板判断待匹配 直流无刷电机运行。
所述的判断待匹配直流无刷电机类型的方法为,根据待匹配直流无刷电机的配置参数判断待匹配直流无刷电机类型,所述配置参数为待匹配电机上的装配的磁铁个数或霍尔个数。
所述变频控制板中还预置每种直流无刷电机的配置参数,包括如下检测步骤:
(a1)待匹配电机通电运行;
(a2)所述变频控制板判断待匹配直流无刷电机的配置参数,并查找与待匹配直流无刷电机的配置参数相对应的直流无刷电机驱动程序,驱动直流无刷电机运行;
(a3)变频控制板将该直流无刷电机驱动程序设为默认的直流无刷电机驱动程序。
所述的查询参数为预置直流无刷电机控制程序相应的直流无刷电机的配置参数,所述查询参数为预置直流无刷电机控制程序相应的直流无刷电机上的装配的磁铁个数或霍尔个数,所述查询参数与预置直流无刷电机控制程序是一一对应的设置在变频控制板中。
所述变频控制板中预置一种首选直流无刷电机驱动程序,步骤(a2)中变频控制板首先判断待匹配直流无刷电机的配置参数与首选直流无刷电机驱动程序对应的配置参数相同时,变频控制板以首选直流无刷电机驱动程序驱动待测直流无刷电机运行;待匹配电机的配置参数与首选直流无刷电机驱动程序对应的配置参数不同,则变频控制板以待匹配电机的配置参数对应的一种直流无刷电机驱动程序驱动待匹配直流无刷电机运行固定时间T2,变频控制板检测其运行信号,待匹配直流无刷电机运行正常,则执行步骤(a3),若待匹配电机运行不正常,则变频控制板作出更新驱动程序的提示。
所述变频控制板中预置一种首选直流无刷电机驱动程序,步骤(a2)中待匹配电机的配置参数与首选直流无刷电机驱动程序对应的配置参数不同,所述待匹配直流无刷电机的配置参数对应至少两种预置直流无刷电机驱动程序,则变频控制板选择其中一种预置直流无刷电机驱动程序驱动待匹配电机运行固定时间T2,变频控制板检测其运行信号,待匹配直流无刷电机运行正常,则执行步骤(a3),若待匹配电机运行不正常,则变频控制板选择另一种与待匹配直流无刷电机的配置参数对应的预置直流无刷电机驱动程序,驱动待匹配直流无刷电机运行固定时间T2,并检测其运行信号,直至选出待匹配电机运行正常时对应的预置直流无刷电机驱动程序,执行步骤(a3);若无使直流无刷电机运行正常的驱动程序,则变频控制板作出更新驱动程序的提示。
所述变频控制板中未设置首选直流无刷电机驱动程序,变频控制板查找待匹配直流无刷电机的配置参数对应的一种预置直流无刷电机运行程序,并以该直流无刷电机运行程序驱动待匹配直流无刷电机运行固定时间T2,变频控制板检测其运行信号,待匹配直流无刷电机运行正常,则执行步骤(a3),若待匹配直流无刷电机运行不正常,则变频控制板作出更新驱动程序的提示。
所述变频控制板中未设置首选直流无刷电机驱动程序,变频控制板查找待匹配直流无刷电机的配置参数对应的至少两种预置直流无刷电机驱动程序,变频控制板一其中一种预置直流无刷电机驱动程序驱动待匹配直流无刷电机运行固定时间T2,变频控制板检测其运行信号,待匹配直流无刷电机运行正常,则执行步骤(a3),若待匹配直流无刷电机运行不正常,则变频控制板选择另一种与待匹配直流无刷电机的配置参数对应的预置直流无刷电机驱动程序,驱动待匹配直流无刷电机运行固定时间T2,并检测其运行信号,直至选出待配直流无刷电机类型并查找相应直流无刷电机驱动程序驱动待匹配直流无刷电机运行。匹配电机运行正常时对应的预置直流无刷电机驱动程序,执行步骤(a3);若无使直流无刷电机运行正常的驱动程序,则变频控制板作出更新驱动程序的提示。
所述变频控制板中未设置与待匹配直流无刷电机的配置参数相对应的直流无刷电机驱动程序,则变频控制板作出更新驱动程序的提示。
所述的判断待匹配直流无刷电机类型的方法为,变频控制板以固定的指令驱动待匹配直流无刷电机运行固定时间T1,待匹配直流无刷电机反馈信号,变频控制板根据待匹配电机反馈信号判断待匹配直流无刷电机类型。
所述变频控制板中还预置与每种直流无刷电机驱动程序相对应的查询单元,包括如下检测步骤:
(b1)所述变频控制板连接待匹配直流无刷电机后通过固定的指令驱动待匹配直流无刷电机启动;
(b2)待匹配直流无刷电机运行固定时间T1并反馈信号至变频控制板;
(b3)变频控制板根据反馈信号所属查询单元,调用相应的直流无刷电机驱动程序驱动待匹配直流无刷电机运行;
(b4)变频控制板将该直流无刷电机驱动程序设为默认的直流无刷电机驱动程序。
步骤(b1)所述固定指令为预置在变频控制板中的驱动直流无刷电机运行的驱动指令,使待匹配直流无刷电机以固定的频率、电压或电流或转速运行时间T1。
所述查询单元为在检测前将多种直流无刷电机使用固定的频率或固定电压或固定电流通电固定的时间进行检测得到的检测信号或信号范围,查询单元与查询单元对应的直流无刷电机驱动程序储存在变频控制板中,查询单元为一闭合区间,所述查询单元与相应的直流无刷电机的驱动程序一一对应的设置在变频控制板中。
所述变频控制板中设置一种首选的直流无刷电机驱动程序,若步骤(b3)中反馈信号所属查询单元对应的是首选直流无刷电机的驱动程序,则变频控制板按照首选直流无刷电机驱动程序驱动待匹配电机运行;若步骤(b3)中反馈信号所属查询区间对应的不是首选直流无刷电机的驱动程序,则变频控制板按照反馈信号所属查询单元对应的一种预置直流无刷电机驱动程序驱动待匹配直流无刷电机运行时间T2,变频控制板检测其运行信号,待匹配直流无刷电机运行正常,则执行步骤(b4),若待匹配电机运行不正常,则变频控制板作出更新驱动程序的提示。
所述变频控制板中设置一种首选的直流无刷电机驱动程序,若步骤(b3)中所述反馈信号所属查询单元对应的不是首选直流无刷电机的驱动程序,同时,反馈信号所属至少两个查询单元,则变频控制板调用与反馈信号所属查询单元对应的预置直流无刷电机驱动程序,变频控制板先选择其中一种直流无刷电机驱动程序驱动待匹配直流无刷电机运行时间T2,变频控制板检测其运行信号,待匹配直流无刷电机运行正常,则执行步骤(b4);若待匹配电机运行不正常,则选择另外的一种与反馈信号所述查询单元相对应的直流无刷电机的驱动程序驱动待匹配电机运行时间T2,变频控制板检测其运行信号是否正常,直至选择到待匹配直流无刷电机运行正常的直流无刷驱动程序,则执行步骤(b4),若无使直流无刷电机运行正常的驱动程序,则变频控制板作出更新驱动程序的提示。
所述变频控制板中未设置首选直流无刷电机驱动程序,步骤(b3)中变频控制板按照反馈信号所属查询单元对应的一种预置直流无刷电机驱动程序驱动待匹配直流无刷电机运行时间T2,变频控制板检测其运行信号,待匹配直流无刷电机运行正常,则执行步骤(b4),若待匹配电机运行不正常,则变频控制板作出更新驱动程序的提示。
所述变频控制板中未设置首选直流无刷电机驱动程序,步骤(b3)所述反馈信号所属至少两个查询单元,则变频控制板调用与反馈信号所属查询单元对应的直流无刷电机的驱动程序,变频控制板先选择其中一种直流无刷电机的驱动程序驱动待匹配直流无刷电机运行时间T2,变频控制板检测其运行信号,待匹配直流无刷电机运行正常,执行步骤(b4);若待匹配直流无刷电机运行不正常,变频控制板选择反馈信号所属查询单元对应的另外任一种直流无刷电机的驱动程序驱动待匹配直流无刷电机运行时间T2,并检测其运行信号是否正常,直至选择到反馈信号所述查询单元对应的直流无刷电机驱动程序驱动待匹配直流无刷电机运行正常时的驱动程序,则执行步骤(b4),若无使直流无刷电机运行正常的驱动程序,则变频控制板作出更新驱动程序的提示。
所述步骤(b3)中变频控制板中无待匹配直流无刷电机的反馈信号所属查询单元,则变频控制板作出更新直流无刷电机驱动程序的提示。
所述变频控制板中设置外接更新接口,通过所述外界更新接口更新所述直流无刷电机驱动程序。
一种应用所述匹配多种直流无刷电机控制程序的检测方法的电器,其特征在于:所述电器安装有变频控制板,所述变频控制板中预置有多种直流无刷电机的驱动程序 。
一种匹配多种直流无刷电机驱动程序的控制方法改善效果
《一种匹配多种直流无刷电机驱动程序的控制方法》的一种匹配多种直流无刷电机的控制程序的检测方法,能够提高变频控制板标准化、模块化的检测,使一种变频控制板通过自识别、自适应可以匹配不同的直流无刷电机。
《一种匹配多种直流无刷电机驱动程序的控制方法》的具有上述变频控制板的电器,能够拼配不同的直流无刷电机,自适应的检测其最佳驱动程序,驱动其运行 。

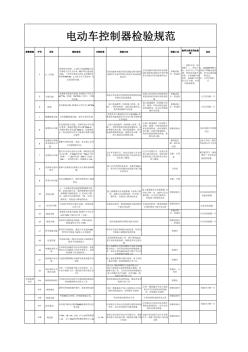 电动车直流无刷电机控制器检验规范
电动车直流无刷电机控制器检验规范
 光伏水泵用直流无刷电机控制技术研究
光伏水泵用直流无刷电机控制技术研究