《自动化专业系列教材:自动控制原理》
-
-
版次:2
-
商品编码:10219860
-
品牌:墨点
-
包装:平装
-
开本:16开
-
-
用纸:胶版纸
-
页数:438
-
正文语种:中文
内容简介
本书的内容包括经典控制理论的线性定常系统理论(时域分析法、根轨迹法、频率响应法等),非线性系统理论和线性离散(时间)控制系统理论等。
本书在保持课程内容的系统性和连贯性的基础上,重点突出,篇幅精简。各章均有较丰富的例题和习题,便于读者自学。
本书可作为高等学校工科自动化专业及相近专业的教材,也可供有关专业师生及从事自动化方面工作的工程技术人员参考。
目录
第一章 绪论
第一节 引言
第二节 自动控制的基本概念
第三节 自动控制系统的组成
第四节 自动控制系统的分类
第五节 自动控制系统的应用实例
第六节 对自动控制系统的基本要求及本课程的研究内容
本章小结
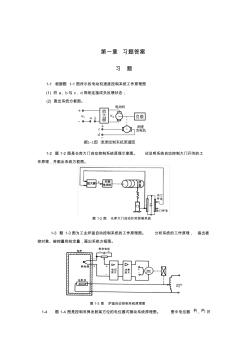
习题
第二章 自动控制系统的数学模型
第一节 控制系统微分方程的编写
第二节 传递函数
第三节 控制系统的结构图及其等效变换
第四节 自动控制系统的传递函数
第五节 信号流图
第六节 脉冲响应函数
本章小结
习题
第三章 自动控制系统的时域分析
第一节 稳定性和代数稳定判据
第二节 典型输入信号和阶跃响应性能指标
第三节 一阶系统的动态性能指标
第四节 二阶系统的动态性能指标
第五节 高阶系统的动态性能
第六节 稳态误差分析
第七节 基本控制规律的分析
第八节 利用MATLAB进行时域分析
本章小结
习题
第四章 根轨迹分析法
第一节 根轨迹的基本概念
第二节 绘制根轨迹的基本法则
第三节 控制系统根轨迹的绘制
第四节 求取闭环系统零、极点的方法
第五节 增加开环零、极点对根轨迹的影响
第六节 控制系统的根轨迹法分析举例
第七节 利用MATLAB绘制根轨迹图
本章小结
习题
第五章 频率特性分析法
第一节 频率特性的基本概念
第二节 频率特性的几种图示方法
第三节 典型环节的频率特性
第四节 系统的开环频率特性
第五节 奈奎斯特稳定判据
第六节 稳定裕度
第七节 利用开环频率特性分析系统的性能
第八节 利用闭环频率特性分析系统的性能
第九节 利用MATLAB绘制频率特性曲线图
本章小结
习题
第六章 自动控制系统的校正
第一节 控制系统校正的基本概念
第二节 常用校正装置及其特性
第三节 自动控制系统的频率法校正
第四节 串联校正装置的根轨迹法设计
第五节 串联校正装置的期望对数频率特性设计法
第六节 并联校正装置的设计
本章小结
习题
第七章 非线性控制系统的分析方法
第一节 非线性控制系统概述
第二节 相平面分析法
本章小结
习题
第八章 线性离散(时间)控制系统分析
第一节 线性离散(时间)控制系统的基本概念
第二节 采样过程和采样定理
第三节 Z变换
第四节 离散(时间)控制系统的数学模型
第五节 离散(时间)控制系统稳定性分析
第六节 离散(时间)控制系统的稳态误差分析
第七节 离散(时间)控制系统的动态性能分析
第八节 离散(时间)控制系统的校正
本章小结
习题
附录
附录Ⅰ 常用函数拉氏变换表
附录Ⅱ 拉氏变换的一些定理
附录Ⅲ Z变换表
参考文献 2100433B

 自动控制原理答案
自动控制原理答案