自适应变结构控制自适应控制
为了设计一个满意的控制系统,不论是通常的反馈控制系统,还是最优控制系统,必须事先掌握描述系统运动规律的数学模型及其随环境等变动的情况,否则,用一般的反馈控制方法或最优控制方法是难于设计出满意的控制系统。然而,某些被控对象的数学模型及其环境情况难以明确描述,某些被控对象的特性和环境在系统运行中会发生不可预测的变动,而这是设计者所不能完全掌握的。这些情况的存在,很自然地促使人们产生两种想法:一种是人们根据所有参数都事先设计好,这种方法的代表就是PID调节器;另一种想法就是设计出这样一种调节器或控制器,它不需要人们在现场不断调节,不需要事先详知被控对象的特性,而能在系统运行中自己辨识对象,自行调节控制器本身的结构和参数来满足系统性能的要求,这就是自适应控制思想。利用自适应控制能够解决一些常规的反馈控制所不能解决的复杂控制问题,能大幅度地提供系统的稳定精度和跟踪精度。
在50年代末,由于飞行控制的需要,美国麻省理工学院(MIT)怀特克教授( W hitaker)首先提出飞机自动驾驶仪的模型参考自适应控制方案,称为MIT方案。在该方案中采用局部参数优化理论设计自适应控制规律,这一方案没有得到实际应用。用局部参数优化方法设计模型参考自适应系统,还需检验其稳定性,这就限制了这一方法的应用。在1966年德国学者帕克斯(P.C.Parks)提出采用李雅普诺夫(A.M.Liapunov)第二法来推导自适应算法,以保证自适应系统全局渐近稳定。在用被控对象的输入输出构成自适应规律时,在自适应规律中包含输入和输出的各阶导数,这就降低了自适应对干扰的抑制能力。为了避免这一缺点,印度学者纳朗特兰(K.S.Narendra)和其他学者提出各自的不同方案。罗马尼亚学者波波夫(V.M.Popov)在1963年提出超稳定性理论,法国学者兰道(I.D.Landau) 把超稳定性理论应用到模型参考自适应控制中来。用超稳定性理论设计的模型参考自适应系统是全局渐近稳定的。
自校正调节器是在1973年由瑞典学者阿斯特罗姆(K.J.Astrom) }3z」和威特马克(B . Wittenmark)首先提出来的。1975年克拉开(D.W.Clark)等提出自校正控制器。1979年威尔斯特德(P.E.Wellstead)和阿斯特罗姆提出极点配置自校正调节器和伺服系统的设计方案。最早的直接成果是阿斯特罗姆教授在造纸厂获得成功应用的自校正调节器。从那以后至80年代以前,有关自适应控制的论文虽然很多,但实际成果应用的例子仅有6个:
1)1974年,吉尔巴特和纹斯顿(Gilbart and Winston)利用模型参考自适应控制,使一种光学望远镜的精度提高了5倍以上;
2)1974年,博里森和西丁(Borrison and Syding)在200kW的矿石破碎机中采用自校正控制,使产量提高了约10%;
3)1975年,塞格拉尔和赫德奎斯特(Cegrall and Hedquist)利用类似的自适应方案,改进了造纸机湿度控制回路的性能;
4)1978年,杜蒙和比朗格(Dnmont and Belanger)使工业二氧化钦窑的静态性能改善了10%,动态性能也有改进;
5)1979年,卡尔斯特拉姆等(Kallstrom et al.)在35.5万吨的油轮上采用自校正驾驶控制,使速度提高了;
6)1980年,阿默翁根(Amerongen)在远洋测量船上采用模型参考自适应方法,使平均速度略有提高。
自适应控制经过30多年的发展,无论在理论上或在应用上都取得了很大的进展。进入80年代后,由于计算机的迅速发展,特别是微处理机的广泛普及,为自适应控制的实际应用创造了有利条件。自适应控制在飞行控制、卫星跟踪望远镜的控制、大型油轮的控制、电力拖动、造纸和水泥配料等方面的控制中得到应用。现在,自适应控制在航天、航海、过程控制、电气传动、机器人、经济管理、生物、医学、交通等多方面都取得了可喜的成果。
自适应变结构控制变结构控制
从广义上讲,变结构系统主要有两类:一类是具有滑动模态的变结构系统;另一类是不具有滑动模态的变结构系统。一般所说的变结构系统均指前者,这是因为具有滑动模态的变结构系统不仅对外界干扰和参数摄动具有较强的鲁棒性,而且可以通过滑动模态的设计来获得满意的动态品质。
变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的结构并不固定,而是可以在动态过程中,根据系统当前的状态有目的地不断变化,迫使系统按照预定滑动模态的状态轨迹运动,所以又常称变结构控制为滑动模态控制,即滑模变结构控制。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。该方法的缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑面向这平衡点滑动,而是在滑模面两侧来回穿越,从而产生颤动。
变结构控制出现于20世纪50年代,经历了50余年的发展,己形成了一个相对独立的研究分支,成为自动控制系统的一种设计方法,适用于线性与非线性系统、连续与离散系统、确定性与不确定性系统、集中参数与分布参数系统、集中控制与分散控制等。并且在实际工程中逐渐得到推广应用,如电机与电力系统控制、机器人控制、飞机控制、卫星姿态控制等。这种控制方法通过控制量的切换使系统状态沿着滑模面滑动,使系统在受到参数摄动和外干扰时具有不变性,正是这种特性使得变结构控制方法受到各国学者的重视。
变结构控制的发展过程大致可分为三个阶段:(1)1957-1962年为研究初级阶段。前苏联的学者Emelyanov在20世纪50年代提出了变结构控制的概念,之后,Utkin等人进一步发展了变结构理论,其基本研究对象为二阶线性系统。(2)60年代的学者开始针对高阶线性系统进行研究,但仍然限于单输入、单输出系统。主要讨论了高阶线性系统在线性切换函数下控制受限与不受限及二次型切换函数的情况。(3)1970年以后,在线性空间上研究线性系统的变结构控制。主要结论为变结构控制对摄动及干扰具有不变性。1977年,V .I. Utkin发表了一篇有关变结构控制方面的综述论文提出了滑模变结构控制和滑模控制的方法。此后,各国学者对变结构控制的研究兴趣急剧上升,开始研究多维变结构系统和多维滑动模态,对变结构控制系统的研究由规范空间扩展到更一般的状态空间。K.D.Yong等从工程的角度,对滑模控制进行了全面的分析,并对滑模控制所产生的抖振进行了精确的分析和评估,针对连续系统中的抑制抖振给出了七种解决方法,并针对离散系统在三种情况下的滑模设计进行了分析,为滑模控制在工程上的应用提供了有益的指导。
对变结构控制的研究大多数集中在滑动模态上,而对进入切换面之前的运动,即正常的运动阶段研究较少。中国学者高为炳院士等首先提出了趋近律的概念,列举了诸如等速趋近律、指数趋近律、幂次趋近律直到一般趋近律,高氏等还首次提出了自由递阶的概念。
在解决十分复杂的非线性系统的综合问题时,变结构系统理论作为一种综合方法得到重视。但是滑模变结构对系统的参数摄动和外部干扰的不变性是以控制量的高频抖振换取的,由于在实际应用中,这种高频抖振在理论上是无限快的,没有任何执行机构能够实现;同时,这样的高频输入很容易激发系统的未建模特性,从而影响系统的控制性能。因而抖振现象给变结构控制在实际系统中的应用带来了困难。
由于人们认识到变结构系统中的滑动模态具有不变性,这种理想的鲁棒性对工程应用也是很有吸引力的。高精度伺服系统存在着许多不利于控制系统设计的因素,如非线性因素、外干扰及参数摄动等。由于离散滑模变结构控制自身的缺点,将其直接应用到高精度的伺服系统中将会有一定的困难,因为控制输出的高频抖振会损坏伺服系统中的电机和其他设备。要将离散滑模变结构控制应用到伺服系统中,使其真正发挥它的强鲁棒性,必须对传统的离散滑模变结构控制进行改进,并针对抖振现象改进离散滑模控制器,将有害的抖振减小到一定程度,并且又要保证滑模控制的不变性。因此,对传统的离散滑模变结构控制的改进、抖振的削弱成为研究的重点。

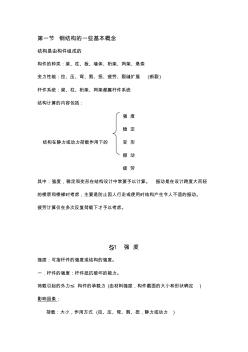 钢结构基本概念
钢结构基本概念
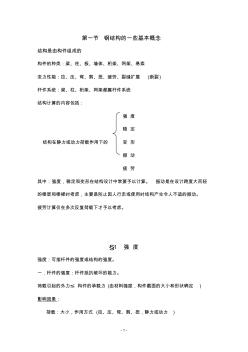 钢结构基本概念
钢结构基本概念