多参数控制简介文献

 数控铣床简介
数控铣床简介
数控铣床简介
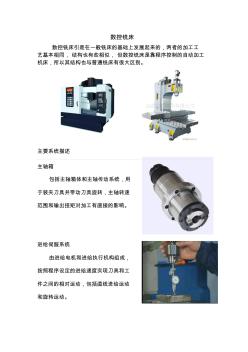
数控铣床 数控铣床引是在一般铣床的基础上发展起来的,两者的加工工 艺基本相同, 结构也有些相似, 但数控铣床是靠程序控制的自动加工 机床,所以其结构也与普通铣床有很大区别。 主要系统描述 主轴箱 包括主轴箱体和主轴传动系统,用 于装夹刀具并带动刀具旋转,主轴转速 范围和输出扭矩对加工有直接的影响。 进给伺服系统 由进给电机和进给执行机构组成, 按照程序设定的进给速度实现刀具和工 件之间的相对运动,包括直线进给运动 和旋转运动。 控制系统 数控铣床运动控制的中心, 执行数控加工程序控制机床进行 加工。 辅助装置 如液压、气动、润滑、冷却系统、排屑和防护等装置。 机床基础件 通常是指底座、立柱、横梁等,它是整个机床的基础和框架 数控铣床的特点 1、零件加工的适应性强、灵活性好, 能加工轮廓形状特别复杂或难以控制 尺寸的零件,如模具类零件、壳体类 零件等。 2、能加工普通机床无法加工或很难加 工
 FANUC数控系统简介
FANUC数控系统简介
FANUC数控系统简介
1 FANUC 数控系统简介 一、FANUC 数控系统的发展 1、FANUC 公司创建于 1956 年,1959 年首先推出了电液步进电机, 在后来的若干年中逐步发展并完善了以硬件为主的开环数控系统。 进 入 70 年代,微电子技术、功率电子技术,尤其是计算技术得到了飞 速发展,FANUC 公司毅然舍弃了使其发家的电液步进电机数控产品, 一方面从 GETTES 公司引进直流伺服电机制造技术。 1976 年 FANUC 公司研制成功数控系统 5,随时后又与 SIEMENS 公司联合 研制了具有先进水平的数控系统 7,从这时起, FANUC 公司逐步发 展成为世界上最大的专业数控系统生产厂家, 产品日新月异,年年翻 新。 2、1979 年研制出数控系统 6,它是具备一般功能和部分高级功能的 中档 CNC 系统, 6M 适合于铣床和加工中心; 6T 适合于车床。与过 去机型比较,使用了大容量磁