欧空局(ESA)在国际空间站俄罗斯部分安装了一个欧洲机器人手臂(European Robotic Arm,ERA),该臂长11m,具有7自由度,对称结构,两端各有一个手腕,利用两个手腕可使机械臂在空间站上移动。ERA主要用于在轨装配和其他舱外服务。
-

选择特殊符号
选择搜索类型
请输入搜索
ERA主要用于在轨装配和其他舱外服务,主要有3个部分组成:摄像与照明单元(CLU)摄相机系统,人机接口和避撞系统(Application Layer Software and Collision Avoidance System)。
CLU摄相机系统,由4部摄像机组成,主要任务是为航天员提供图像,并为ERA控制计算指示目标方位。每个摄相机配备一台内置机关二极管照明装置。
人机接口主要用于航天员舱外活动时对机械臂进行有效控制。该设备是随着ERA项目一起研制成功的,主要部件包括控制中枢显示设备和接口系统,通过主控制平台与ERA总控制计算机总线相连。
避撞系统可以通过三维几何模型实时估计计算碰撞风险洗漱,确保国际太空站的安全运行。
欧空局(ESA)在国际空间站俄罗斯部分安装了一个欧洲机器人手臂(European Robotic Arm,ERA),该臂长11m,具有7自由度,对称结构,两端各有一个手腕,利用两个手腕可使机械臂在空间站上移动。ERA主要用于在轨装配和其他舱外服务。
欧洲机械臂的相关技术参数:
总长 11 300 mm
有效范围 9 700 mm
精确度 3 mm
最大位移速度 200 mm/s
发射载重 630 kg
工作载荷 8 000 kg
平均能耗 475 W (120 V 直流电)
峰值能耗 800 W (120 V 直流电)
制作材质 轻型碳纤维管及铝制接头
机械手与机械臂其实是大同小异的,可以理解为机械臂是机械手的一部分,就一手臂
机器人手臂上的微型步进电机型号是faulhaber微型步进电机,最小外径6mm。微型步进电机是微机电系统中的关键执行部件。随着电子技术和精密加工技术研究的深入,微电机正朝着微型化、多gmp16-050...
1.手臂直线运动机构常见方式:行程小时:采用油缸或汽缸直接驱动;当行程较大时:可采用油缸或汽缸驱动齿条传动的倍增机构或采用步进电机或伺服电机驱动,并通过丝杆螺母来转换为直线运动。典型结构:n油缸驱动的...

 全路面起重机起重臂主要结构设计
全路面起重机起重臂主要结构设计
全路面起重机起重臂主要结构设计
毕业设计说明书 全路面起重机起重臂主要结构设计 院 部: 机械工程学院 学生姓名: ## 指导教师: ### 职称 教授 专 业: 机械设计制造及其自动化 班 级: ########### 完成时间: 二零一四年五月 摘 要 随着经济建设的迅速发展, 我国的基础建设力度正逐渐加大, 道路交通,机 场,港口,水利水电,市政建设等基础设施的建设规模也越来越大,市场起重机 的需求也随之增加。 工况的不同也对起重机的性能要求越来越高, 给起重机设计 者带来无尽的挑战。而我国起重机中汽车起重机比重达到 80%以上,全地面起重 机比重不高,而全地面起重机起重能力比汽车起重机要强, 所以全地面起重机研 究是我国起重机研究的重点。 本文通过对全地面起重机研究, 以起重机起重臂为 设计重点,零件的校核计算及结构设计,使起重设备运行平稳,定位准确,安全
 电梯主要结构..
电梯主要结构..
电梯主要结构..
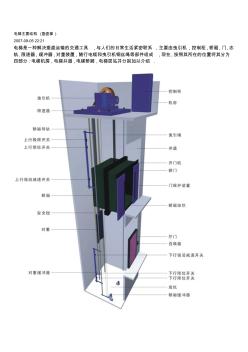
电梯主要结构 (垂直梯 ) 2007-09-05 22:21 电梯是一种解决垂直运输的交通工具 ,与人们的日常生活紧密联系 ,主要由曳引机 ,控制柜 ,轿厢 ,门,志 轨,限速器 ,缓冲器 ,对重装置 ,随行电缆和曳引机钢丝绳等部件组成 ,现在 ,按照其所在的位置将其分为 四部分 :电梯机房 ,电梯井道 ,电梯轿厢 ,电梯层站并分别加以介绍 . 一,电梯机房 ,电梯机房是电梯的大脑和心脏 ,电梯的控制系统和动力系统均安装在这里 .机房内安装了 电梯曳引机 (TRACTION MACHINE),导向轮 (GUIDE WHEEL),控制屏 (CONTROL CABINET),限速器 (RUNAWAY GOVERNOR).电源控制箱 (MASTER POWER SWITCH)等主要设备 . 大多数类型的电梯的电梯机房位于井道顶部 的上方 ,简称 "上机房 "因建筑物结构的限制 ,电梯机
欧洲机械臂的相关技术参数:
总长 11 300 mm
有效范围 9 700 mm
精确度 3 mm
最大位移速度 200 mm/s
发射载重 630 kg
工作载荷 8 000 kg
平均能耗 475 W (120 V 直流电)
峰值能耗 800 W (120 V 直流电)
制作材质 轻型碳纤维管及铝制接头
欧空局(ESA)在国际空间站俄罗斯部分安装了一个欧洲机器人手臂(European Robotic Arm,ERA),该臂长11m,具有7自由度,对称结构,两端各有一个手腕,利用两个手腕可使机械臂在空间站上移动。ERA主要用于在轨装配和其他舱外服务。

机器人系统是由视觉传感器、机械臂系统及主控计算机组成,其中机械臂系统又包括模块化机械臂和灵巧手两部分。整个系统的构建模型如图1所示。