PID调节仪主要技术指标文献

 论文—主要技术指标分析
论文—主要技术指标分析
论文—主要技术指标分析
第十章 主要技术指标分析 一、 名词解释 1、 指数平滑异 同平均线 (MACD) 2 、 相对强弱指数 (RSl) 3、 随机指标 KDJ 4、成交量净额法 OBV 二、单项选择题 1、下面指标中,根 据其计算方法,理论上所给出买、卖信号最可靠的是 ( ) A、MA B、MACD C、WR% D、KDJ 2、()是由股票的上 涨家数和下降家数的比值,推断股票市场多空双方力 量的 对比,进而判断出股票市场的实际情况。 A、ADL B、ADR C、 OBOS D、WMS% 3 、( )主要是从股票投资者买卖趋向的 心理方面,对多空双方的力量对 比进行探索。 A、PSY B、 BIAS C、RSI D、WMS% 4 、当 RSI 随股价回跌而从高价位 滑落,接近先前回跌所形成的密集区域 时,该密集区具有 支撑股价的作用而使 RSI 具备弹升的条件,是( )时机。 A.卖出 B.买进 C.都可
 29建筑材料主要技术指标
29建筑材料主要技术指标
29建筑材料主要技术指标
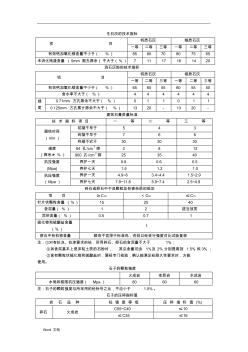
. Word 文档 生石灰的技术指标 项 目 钙质石灰 镁质石灰 一等 二等 三等 一等 二等 三等 有效钙加氧化镁含量不小于( %) 85 80 70 80 75 65 未消化残渣含量 (5mm 圆孔筛余)不大于(%) 7 11 17 16 14 20 消石灰粉的技术指标 项 目 钙质石灰 镁质石灰 一等 二等 三等 一等 二等 三等 有效钙加氧化镁含量不小于( %) 65 60 55 60 55 50 含水率不大于( %) 4 4 4 4 4 4 细 度 0.71mm 方孔筛余不大于( %) 0 1 1 0 1 1 0.125mm 方孔累计筛余不大于( %) 13 20 - 13 20 - 建筑石膏质量标准 技 术 指 标 项 目 一 等 二 等 三 等 凝结时间 (min) 初凝不早于 5 4 3 终凝不早于 7 6 6 终凝不迟于 30 30 30 细度 (筛余≯