偏态系数计算公式文献

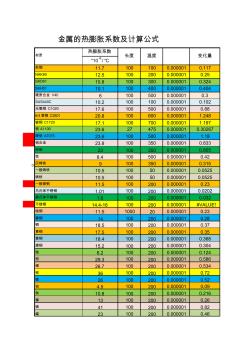 金属的热膨胀系数及计算公式
金属的热膨胀系数及计算公式
金属的热膨胀系数及计算公式
热膨胀系数 *10 -6 /℃ 软钢 11.7 100 100 0.000001 0.117 NAK80 12.5 100 200 0.000001 0.25 SKD61 10.8 100 300 0.000001 0.324 SKH51 10.1 100 400 0.000001 0.404 硬质合金 V40 6 100 500 0.000001 0.3 SUS440C 10.2 100 100 0.000001 0.102 无氧钢 C1020 17.6 100 500 0.000001 0.88 6/4黄铜 C2801 20.8 100 600 0.000001 1.248 铍铜 C1720 17.1 100 700 0.000001 1.197 铝 A1100 23.6 27 475 0.000001 0.30267 硬铝 A7075 23.6 100 500 0.0000
 软基沉降计算公式及经验系数的猜想
软基沉降计算公式及经验系数的猜想
软基沉降计算公式及经验系数的猜想
软基沉降计算公式及经验系数的猜想——基于太沙基一维固结理论推导了真空一堆载联合预压法处理软基沉降估算公式,并用于计算工程实例。在将结果与实测值相对比的基础上,提出了修正参数,使得结果更贴切实际,具有一定的参考意义。