陀螺仪器最早是用于航海导航,但随着科学技术的发展,它在航空和航天事业中也得到广泛的应用。陀螺仪器不仅可以作为指示仪表,而更重要的是它可以作为自动控制系统中的一个敏感元件,即可作为信号传感器。
根据需要,陀螺仪器能提供准确的方位、水平、位置、速度和加速度等信号,以便驾驶员或用自动导航仪来控制飞机、舰船或航天飞机等航行体按一定的航线飞行,而在导弹、卫星运载器或空间探测火箭等航行体的制导中,则直接利用这些信号完成航行体的姿态控制和轨道控制。
作为稳定器,陀螺仪器能使列车在单轨上行驶,能减小船舶在风浪中的摇摆,能使安装在飞机或卫星上的照相机相对地面稳定等等。作为精密测试仪器,陀螺仪器能够为地面设施、矿山隧道、地下铁路、石油钻探以及导弹发射井等提供准确的方位基准。
由此可见,陀螺仪器的应用范围是相当广泛的,它在现代化的国防建设和国民经济建设中均占重要的地位。此处我们重点介绍在电子领域中现在比较流行的MEMS陀螺仪。
广泛使用的MEMS陀螺(微机械)可应用于航空、航天、航海、兵器、汽车、生物医学、环境监控等领域。并且MEMS陀螺相比传统的陀螺有明显的优势:
1、体积小、重量轻。适合于对安装空间和重量要求苛刻的场合,例如弹载测量等;
2、低成本;
3、高可靠性、内部无转动部件,全固态装置,抗大过载冲击,工作寿命长;
4、低功耗;
5、大量程,适于高转速大g值的场合;
6、易于数字化、智能化,可数字输出,温度补偿,零位校正等。
陀螺仪工作原理
消费电子设备早在几年前就开始使用MEMS加速计。从游戏机到手机,从笔记本电脑到白色家电,运动控制式用户界面和增强的保护系统给所有的消费电子产品带来很多好处。
现在轮到MEMS陀螺仪大显神威了,消费电子集成MEMS陀螺仪的浪潮刚刚掀起。
陀螺仪能够测量沿一个轴或几个轴运动的角速度,而MEMS加速计则能测量线性加速度,因此这两者是一对理想的互补技术。
事实上,如果组合使用加速计和陀螺仪这两种传感器,系统设计人员可以跟踪并捕捉三维空间的完整运动,为最终用户提供现场感更强的用户使用体验、精确的导航系统以及其它功能。
ST在EMES市场的份额正在快速增长,作为全球公认的消费电子和手机市场最大的MEMS传感器供应商,ST最近推出了30款以低功耗和小封装为特色的高性能陀螺仪。
ST研制的微机械陀螺仪传感器沿用了ST成功的制造技术,ST利用这项技术已经制造了6亿多颗加速传感器, 选择成功的技术可为客户提供最先进的质量可靠的产品,而且可直接用于最终应用。
ST陀螺仪的核心元件是一个微加工机械单元,按照一个音叉机制运转,利用Coriolis原理把角速率转换成一个特定感应结构的位移。
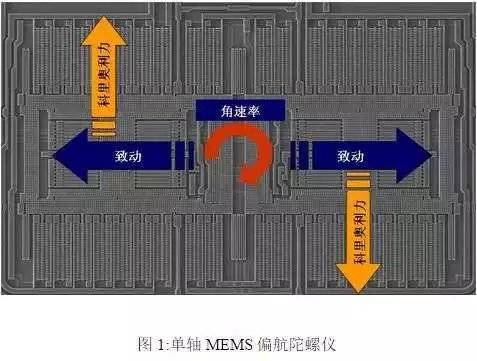
我们以一个单轴偏航陀螺仪为例,探讨最简单的工作原理(图1)。两个正在运动的质点向相反方向做连续运动,如蓝色箭头所示。只要从外部施加一个角速率,就会产生一个与质点运动方向垂直的科里奥利力,如图中黄色箭头所示。
产生的科里奥利力使感应质点发生位移,位移大小与所施加的角速率大小成正比。因为传感器感应部分的运动电极(转子)位于固定电极(定子)的侧边,上面的位移将会在定子和转子之间引起电容变化,因此,在陀螺仪输入部分施加的角速率被转化成一个专用电路可以检测的电参数。
因为ST选用了音叉方法设计陀螺仪,其差分特性使系统本身对作用在传感器上的无用线性加速度和杂乱振动的敏感度低于市场上现有的其它类型陀螺仪。当这些无用的信号被施加到陀螺仪,两个质点就会沿相同方向位移,在一个差分测量后,最终的电容变化将视为无效。
在系统方面,陀螺仪的信号调节电路可简化为电机驱动部分和加速传感器感应电路两部分(图2): - 电机驱动部分通过静电激励方法,使驱动电路前后振荡,为机械元件提供励磁;
感应部分通过测量电容变化来测量科里奥利力在感应质点上产生的位移,这是一个稳健、可靠的技术,被成功地用于ST的MEMS产品线,能够提供强度与施加在传感器上的角速率成正比的模拟或数字信号。
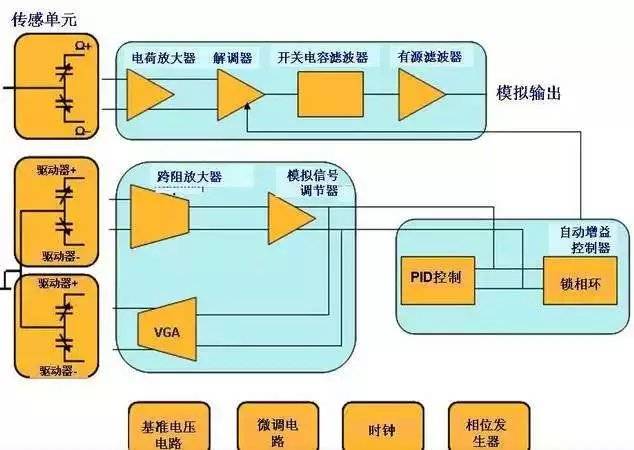
图2:一个单轴偏航MEMS陀螺仪的结构简图
在控制电路内部有先进的电源关断功能,当不需要传感器功能时,可关闭整个传感器,或让其进入深度睡眠模式,以大幅降低陀螺仪的总功耗,当需要检测传感器上施加的角速率时,在接到用户的命令后,传感器可从睡眠模式中立即唤醒。
与ST的MEMS加速计类似,MEMS陀螺仪也沿用一个系统级封装(SIP)方法,机械感应元器件与其调节ASIC电路放在同一个封装内。
智能设计方法结合先进的封装解决方案使得该系列产品的封装尺寸大幅缩减,多轴陀螺仪的系统封装面积仅为3x5 mm2 ,最大厚度仅为1mm (图3)。
意法半导体为客户提供多轴感应、30dps到6000dps量程的各种陀螺仪传感器,让系统设计工程师能够解决不同的应用需求,从图像稳定器到游戏,从指向装置到机器人控制。
除上述传统应用外,整合加速计和陀螺仪可以实现导航解决方案的惯性测量单元。换句话说,平台开发商可利用最新的MEMS技术,将惯性传感器与较传统的GPS系统配合使用,能够在卫星信号很弱的高楼林立的市区或根本没有信号的室内或地铁环境中提供导航服务。
在不久的将来,准确的方位信息与服务厂商提供的附加中间数据将会整合在一起,并显示在用户的手机显示屏幕上,这种定位关联服务将会为手机用户带来好处,例如,手机用户可以获得位于某一个购物中心内的所有商铺的准确信息,找到想要购买的产品的方位提示,接收根据用户兴趣订制的商品特价和打折信息。
整合MEMS加速计和陀螺仪地磁的模块正在进入廉价的电子玩具市场,传感器模块提供的动作感应功能可实现互动的游戏体验,还能让更小的儿童上网分享快乐:孩子们很快就能够创造自己的虚拟娃娃和人物,用自然的动作玩这些玩具,不再使用按钮或键盘一类的东西,甚至可以在网上与全球的小朋友一起分享游戏。
结论:就像几年前加速计的成功故事一样,意法半导体最近掀起了MEMS陀螺仪消费浪潮,为市场提供一系列可靠的低廉的微型陀螺仪,增强多种消费电子产品运动跟踪功能,实现现场感更强的用户体验。
凭借在MEMS技术、ASIC设计和更智能的封装技术上不断取得的进步,结合最先进的生产线和战略合作伙伴关系,意法半导体进一步加强了其MEMS传感器在消费电子和手机市场的领导地位。
陀螺仪的作用
这陀螺仪和重力传感器有什么区别呢?区别很多,但最大的区别就是重力传感对于空间上的位移感受维较少,能做到6个方向的感应就已经很不错了,而陀螺仪则是全方位的。这很重要,毫不夸张的说,这两者不是一个级别上的产品。
可能看到这里,大家还是会觉得有些迷惑,既然陀螺仪很厉害,那么它在手机上到底有什么用呢?我们不妨来看看。
第一大用途,导航。陀螺仪自被发明开始,就用于导航,先是德国人将其应用在V1、V2火箭上,因此,如果配合GPS,手机的导航能力将达到前所未有的水准。实际上,目前很多专业手持式GPS上也装了陀螺仪,如果手机上安装了相应的软件,其导航能力绝不亚于目前很多船舶、飞机上用的导航仪。
第二大用途,可以和手机上的摄像头配合使用,比如防抖,这会让手机的拍照摄像能力得到很大的提升。
第三大用途,各类游戏的传感器,比如飞行游戏,体育类游戏,甚至包括一些第一视角类射击游戏,陀螺仪完整监测游戏者手的位移,从而实现各种游戏操作效果。有关这点,想必用过任天堂WII的兄弟会有很深的感受。
第四大用途,可以用作输入设备,陀螺仪相当于一个立体的鼠标,这个功能和第三大用途中的游戏传感器很类似,甚至可以认为是一种类型。
第五大用途,也是未来最有前景和应用范围的用途。下面重点说说。那就是可以帮助手机实现很多增强现实的功能。增强现实是近期才冒出的概念,和虚拟现实一样,是计算机的一种应用。大意是可以通过手机或者电脑的处理能力,让人们对现实中的一些物体有跟深入的了解。
如果大家不理解,举个例子,前面有一个大楼,用手机摄像头对准它,马上就可以在屏幕上得到这座大楼的相关参数,比如楼的高度,宽度,海拔,如果连接到数据库,甚至可以得到这座大厦的物主、建设时间、现在的用途、可容纳的人数等等。
这种增强现实技术可不是用来满足大家的好奇心,在实际生产上,其用途非常广泛,比如盖房子,用手机一照,就知道墙是否砌歪了?歪了多少? 再比如,假如您是一位伊拉克抵抗美军的战士,平时只需要揣着一部此类手机,去基地那里转转,出来什么坦克,装甲车或者直升机,用手机对准拍下,马上就能判断出武器的型号,速度、运动方向。
陀螺仪产品
意法半导体(ST)推出全球首款双核陀螺仪
意法半导体推出全球首款能够同时处理用户动作识别与相机图像稳定两大功能的双核陀螺仪L3G4IS,创新的系统架构让设备厂商只需一个陀螺仪即可执行两个不同功能,从而优化手机、平板电脑等智能消费电子产品的尺寸、系统复杂性及成本。
这款拥有创新设计的双核陀螺仪L3G4IS在4x4x1 mm封装内整合为两个针对不同功能优化的独立输出通道,同时可处理动作手势识别和光学图像稳定功能,为手机相机实现更加锐利清晰的照片画质。
意法半导体公司副总裁兼模拟产品、MEMS及传感器产品部总经理Benedetto Vigna表示:“通过意法半导体全新双核陀螺仪的创新系统架构,设备厂商只需简单整合一个陀螺仪即可实现动作识别和图像稳定两大功能,而无需再使用两个不同技术规格的专用传感器,终端产品进而可实现更可靠的性能,更纤薄时尚的外观设计以及更低的制造成本。”
意法半导体的全新陀螺仪L3G4IS针对解决电池供电的便携式设备电源限制问题所设计,整合关机和睡眠两个省电模式,内置高级智能电源管理所需的先入先出(FIFO)存储模块。新传感器通过I2C和SPI两个独立通信接口输出数据,还提供多个数字嵌入式功能,如可配置低通/高通滤波器。新款陀螺仪内置温度传感器,电源电压范围为2.4V至3.6V。
ST推出全新"陀螺仪"角速度传感器
意法半导体(ST)推出新款MEMS单轴航向陀螺仪LISY300AL,这款产品采用7 x 7 x 1.5mm的表面贴装封装,角速度测量性能高达每秒300度(全量程)。新产品的主要特性包括:高灵敏度,电源电压范围扩大,从2.7V到3.6V,省电模式可选。新产品还有助于降低游戏控制器、直观指向设备、车用或个人用导航仪等设备的待机功耗,并具备图像稳定功能。
利用意法半导体市场领先的MEMS技术,结合MEMS技术出色的强健性能,在温度变化的条件下和整个产品生命周期内,LISY300AL的灵敏度表现非常稳定。这个特性可以简化设计,提高传感器的可靠性。
LISY300AL还在封装内整合一个低通滤波器及专用芯片接口,设计人员使用很少的外部组件即可开发一个紧凑、低噪的解决方案。此外,高抗震性使新产品可用于对环境要求非常高的应用中,如工业控制和汽车电子系统。内置的自检系统为目标应用带来额外的精确度和可靠性保证。
除游戏和先进指向设备用户界面等消费电子和工业应用外,LISY300AL还可用于机器人和GPS导航系统中的倾斜运动和角运动检测功能。
LISY300AL的绝对速率输出是模拟电压信号。28引脚的LGA封装采用ST的ECOPACK封装技术,符合RoHS法令要求的“绿色节能”标准。
意法半导体推出世界首款3轴汽车陀螺仪
意法半导体(STMicroelectronics,简称ST)推出市场上首款符合汽车集成电路标准(AEC-Q100)的3轴数字输出陀螺仪。意法半导体最新的角速度传感器旨在于提高汽车设备的精度和稳定性,包括仪表板内置导航仪、远程信息处理系统和路桥收费系统。
意法半导体的汽车级陀螺仪能够提供精确的测量结果,可大幅提升汽车导航仪和远程信息处理系统的航位推算和/或地图匹配功能。在GSP卫星信号很差的室内和高楼林立的城区,航位推算系统可弥补信号丢失的影响,代替卫星检测物体的运动和高度。
陀螺仪的精确测量数据还能提高地图匹配精度。地图匹配是在数字地图的公路网络上描述卫星或传感器观测的用户位置的运动轨迹的过程,地图匹配被用于各种导航定位系统,包括交通流量分析和车辆行驶方向。
运用一个检测结构测量沿三个正交轴[1]的运动是意法半导体的业内独一无二的陀螺仪设计概念,可实现新的航位推算和地图匹配功能,能够彻底解决三轴之间的信号干扰问题,从而大幅提升测量精度,具有出色的长时间和宽温度范围输出稳定性。
意法半导体的A3G4250D可测量最高+/-250dps(度/秒)的角速率。陀螺仪的片上接口把角速率数据转换成16位码流,通过标准的SPI或I2C通信协议,安全可靠地传送到一个专用微控制器。新产品提供两个输出引脚(中断和数据准备)和4个用户可选的输出数据速率。
这款3V单电源传感器整合了关断和深度睡眠两种省电模式,并集成一个智能电源管理功能用FIFO(先入先出)存储器模块。A3G4250D内置一个8位温度传感器,工作范围扩大至-40到85°C。这款产品具有很强抗电磁干扰性能,可承担最高10,000g的撞击。
意法半导体的汽车3轴数字陀螺仪的设计和制造采用了与ST目前销售量超过20亿支的运动传感器相同的制造工艺。意法半导体拥有最先进的产品设计能力,8英寸MEMS专用生产线具备大规模制造能力,尖端设计结合巨大产能,这一业内独有的双重优势使公司能够满足好整个供应链的需求。
深迪发布中国首款消费级商用三轴MEMS陀螺仪
深迪半导体(上海)有限公司(Senodia Technologies (Shanghai) Co., Ltd )正式发布其首款三轴微机电(MEMS)陀螺仪产品,ST200G。这是中国首款完全拥有自主知识产权的消费级商用三轴MEMS陀螺仪。
它继深迪2009年底发布中国首款消费级商用单轴MEMS陀螺仪SSZ0304CN打破国内消费电子厂商100%依赖进口陀螺仪芯片之后,又一款里程碑的产品,并宣告中国自主知识产权的消费级MEMS陀螺仪进入三轴时代。
ST200G是一款小体积、低功耗、高性能、低成本的三轴陀螺仪。它采用QFN封装,体积仅为4mm×4mm×0.9mm,工作温度范围为-40摄氏度~+85摄氏度,角速度满量程为+/-250度/秒到+/-2000度/秒。另外,ST200G集成了全部的陀螺信号处理电路,芯片可以设置Burst Mode及不同的中断形式,其性能达到国际先进水平。
三轴MEMS陀螺仪能够同时侦测三个轴向(X, Y, Z)的转动角速度(倾斜、滚动或旋转)。作为姿态识别、遥控、专业游戏、室内导航和实景增强不可或缺的装置,三轴MEMS陀螺仪在消费级领域有如下广泛而理想的应用:
-- 智能手机
-- 平板电脑
-- 游戏手柄
-- 遥控器便
-- 模型玩具
-- 便携式摄像机和数码相机
-- GPS
ST推出全球最小3轴陀螺仪使占板空间缩减40%
意法半导体(STMicroelectronics,简称ST)进一步扩大运动传感器产品组合,推出全球最小的高性能三轴模拟陀螺仪。
L3G3250A整合意法半导体已生产近15.4亿颗运动传感器所采用的稳健可靠、经市场验证的微机械加工技术以及公司积极的封装缩减蓝图,能够满足下一代应(游戏机、虚拟实境输入设备、运动控制人机界面(MMI)、GPS导航系统、家电以及机器人)对更小占板空间的要求。新款传感器是高性能的三轴模拟输出陀螺仪,封装仅为3.5x3x1mm,占板空间从现有产品的17.6 mm3 缩减至10.5 mm3,缩减幅度近40%。
由于谐振频率在音频带宽之外,L3G3250A能够完全抵抗如安装在传感器附近的扬声器产生的音频噪声,以及通过印刷电路板传递的耦合机械振动,新产品进而拥有更高的检测精度和可靠性。
此外,其先进的设计结合三轴一体运动感应结构 可进一步提高精度和可靠性,确保传感器输出在时间和温度特性方面具有业界最高的稳定性。L3G3250A集高检测分辨率和出色的抗音频噪声和机械振动噪声于一身,让手机、平板电脑、游戏机等智能消费电子产品的运动用户界面变得更趋真实。
L3G3250A提供两个用户可选量程 – 625或2500 dps (度/秒) – 检测分辨率分别为2mV/dps和0.5mV/dps。高量程让陀螺仪能够检测速度非常快的手势和运动。产品其它特性包括嵌入式自测功能、宽压电源(2.4V至3.6V)、能够优化电池供电设备电源管理功能的嵌入式关闭和睡眠两种节能模式、嵌入式低通滤波器和高通滤波器复位功能以及出色的防碰撞功能。