自动控制原理第五版内容提要文献

 自动控制原理答案
自动控制原理答案
自动控制原理答案
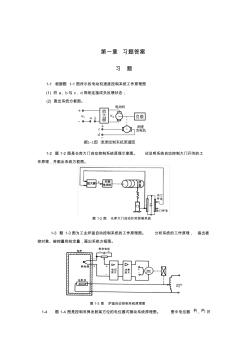
第一章 习题答案 习 题 1-1 根据题 1-1图所示的电动机速度控制系统工作原理图 (1) 将 a, b与 c, d用线连接成负反馈状态; (2) 画出系统方框图。 1-2 题 1-2 图是仓库大门自动控制系统原理示意图。 试说明系统自动控制大门开闭的工 作原理,并画出系统方框图。 题 1-2 图 仓库大门自动开闭控制系统 1-3 题 1-3图为工业炉温自动控制系统的工作原理图。 分析系统的工作原理, 指出被 控对象、被控量和给定量,画出系统方框图。 题 1-3 图 炉温自动控制系统原理图 1-4 题 1-4 图是控制导弹发射架方位的电位器式随动系统原理图。 图中电位器 1P 、 2P 并 联后跨接到同一电源 0E 的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定 元件和测量反馈元件。 输入轴由手轮操纵; 输出轴则由直流电动机经减速后带动, 电动机采 用电枢控制的方式工