状态稳定性简介文献

 稳定性分析报告
稳定性分析报告
稳定性分析报告
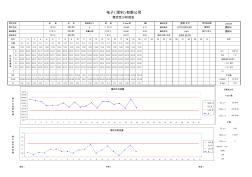
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 8.3 8.4 8.5 8.6 8.7 8.8 8.9 8.10 8.11 8.12 8.13 8.14 8.15 8.16 8.17 8.18 8.19 8.20 8.21 8.22 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 13:00 X1 243.82 243.85 243.80 243.77 243.75 243.87 243.82 243.83 243.80 243.79 243.85 243.72 243.78 243.82 24
 立杆稳定性计算
立杆稳定性计算
立杆稳定性计算
立杆的稳定性计算 : 1. 不考虑风荷载时 , 立杆的稳定性计算 其中 N —— 立杆的轴心压力设计值, N=14.35kN; —— 轴心受压立杆的稳定系数 ,由长细比 l0/i 的结果查表得到 0.26; i —— 计算立杆的截面回转半径, i=1.58cm ; l0 —— 计算长度 (m), 由公式 l0 = kuh 确定, l0=2.60m ; k —— 计算长度附加系数,取 1.155 ; 1) 对受弯构件: 不组合风荷载 上列式中 S Gk、SQk——永久荷载与可变荷载的标准值分别产生的内力和。对受弯构件内力为 弯矩、剪力,对轴心受压构件为轴力; SWk——风荷载标准值产生的内力; f——钢材强度设计值; f k——钢材强度的标准值; W——杆件的截面模量; φ——轴心压杆的稳定系数; A——杆件的截面面积; 0.9,1.2 ,1.4 ,0.85 —