电流控制方式电源电流控制方式在有源电力滤波器中的应用文献

 APF有源电力滤波器
APF有源电力滤波器
APF有源电力滤波器
有源电力滤波器 有源电力滤波器( APF:Active power filter )是一种用于动态 抑制谐波、补偿无功的新型电力电子装置, 它能够对不同大小和频率 的谐波进行快速跟踪补偿,之所以称为有源,是相对于无源 LC滤波 器,只能被动吸收固定频率与大小的谐波而言, APF可以通过采样负 载电流并进行各次谐波和无功的分离,控制并主动输出电流的大小、 频率和相位,并且快速响应,抵销负载中相应电流,实现了动态跟踪 补偿,而且可以既补谐波又补无功和不平衡。 中文名 有源电力滤波器 所属学科 物理 外文名 Active power filter 所属领域 电学 英文简称 APF 种 类 并联型和串联型 目录 1、概述 2、理论基础 3、工作原理 4、标准 5、三电平 ? 技术优势 ? 滤波器 ? 基本应用 ? 主要应用场合 ? 其他 ? 优势 6、性能说明 7、配件选型 1、概述
 单相并联型有源电力滤波器电流复合控制
单相并联型有源电力滤波器电流复合控制
单相并联型有源电力滤波器电流复合控制
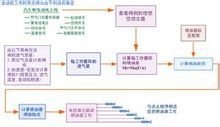
为提高单相并联型有源电力滤波器(Active Power Filters,简称APF)的补偿精度,提出了一种静止坐标系下PI和重复并联运行的电流复合控制策略,其中PI控制主要保证系统的动态性能,基于内模原理的重复控制可以显著提高APF输出电流对负载谐波电流的跟踪精度。对单相APF中的复合控制策略参数进行了设计,理论研究和实验结果表明复合控制策略可以有效提高单相APF的滤波性能,总谐波畸变率降低到3.8%,达到谐波补偿的国家标准。