如何提高电能质量和治理谐波是输配电技术中最迫切的问题之一,有源电力滤波器已成为解决这一问题的关键性技术。建立了三相三线制并联型有源电力滤波器的数学模型,把检测电源电流控制方式应用于并联型有源电力滤波器,通过仿真研究验证了此种控制方法可以有效地实现谐波的动态补偿,证明了该方法的可行性。
电流控制方式检测电源电流控制方式的数学模型
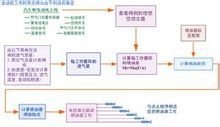
检测电源电流控制方式的等效电路图和结构图中Zs是电源内阻抗,ZHPF为高通滤波器阻抗。ic为指令电流参考值,GZ(s)为is与icL之间的传递函数;G(s)为校正环节,这种控制方式把产生谐振的传递函数GZ(s)包括在闭环内,选择适当的G(s)就可以抑制谐振,为了获得良好的补偿特性,G(s)应有较大的放大倍数,以增大系统的开环增益,但放大倍数太大会使系统不稳定,通常采用一阶惯性微分环节,其传递函数为G(s)=KTs/(1 Ts);GI(s)为指令电流运算电路的传递函数,放大倍数为-1;GA(s)为补偿电流发生器的传递函数,为时间常数很小的一阶惯性环节。得到:icL=iLic;Is(s)=GZ(s)·IcL(s);Ich(s)=G(s)·GI(s)·GA(s)·Is(s)。
电流控制方式并联型有源电力滤波器的控制算法
通过电源电流控制方式实现谐波的检测,为了实现逆变器对谐波电流的补偿,需要控制逆变器使其输出的能够自动跟踪计算所得的参考电流,主要的控制方式有两种,分别是电流跟踪控制和电压控制。电流控制主要有四种,分别是周期采样控制、滞环比较控制、无差拍控制和三角载波线性控制。
1、周期采样控制:此控制方法主要是根据有源电力滤波器输出电流ic与参考电流icref的比较结果在采样脉冲的上升沿改变PWM脉冲的状态。
2、滞环比较控制:此控制方法是将补偿电流参考值icref与逆变器实际电流输出值ic之差Δic输入到具有滞环特性的比较器,通过比较器的输出来控制开关的开合,从而使逆变器输出电流实时快速的跟踪补偿电流参考值。
3、无差拍控制:此控制方法是利用前一刻的补偿电流参考值和实际电流值,计算下一刻的电流参考值及各种开关状态下逆变器的电流输出值,选择某种开关模式作为下一刻的开关状态,从而达到电流误差等于零。但由于无差拍控制方法存在系统误差与调制比对系统参数依赖性大、鲁棒性差、瞬态响应超调量大等缺点,因此在实际中不常用。
4 、三角载波线性控制:此控制方法是将检测电流环节得到的电流实际值ic与参考值icref之间的偏差与高频三角载波比较,所得到的PWM脉冲作为逆变器各开关器件的控制信号,从而在逆变器端得到所需波形的电流。
三角载波是电压型PWM逆变器中应用较多的一种电流控制方式,这种控制方式可以获得恒定的开关频率,装置安全性较高,鉴于此并联型有源电力滤波器中PWM变流器采用三角载波控制算法。
电流控制方式检测电源电流控制方式的可行性
采用检测电源电流控制方式,逆变器采用三角载波控制算法,投入三相并联型有源电力滤波器后的系统仿真波形。在0.02s之前系统电流存在谐波并且电压和电流有相位差,0.02s后并联型有源电力滤波器投入使用,经补偿系统电流相位和电网电压相位基本一致,系统电流波形已接近正弦波,表明此控制策略的可行性。


 基于全数字电流控制开关磁阻电机的研究
基于全数字电流控制开关磁阻电机的研究