环形分配器
- 在步进电机的驱动过程中,控制脉冲通过脉冲分配器控制步进电机励磁绕组按照一定顺序接通、断电,使电机绕组的通电按输入脉冲的控制而循环变化。脉冲分配器又称为环形分配器(简称环分器) 。
-

选择特殊符号
选择搜索类型
请输入搜索
环分器有软件环分器和硬件环分器两种。
软件环分器是将通电顺序状态作一个表格存入计算机内存,由软件通过指针方式查表,并将状态数据输出以控制接口,实现步进电机的连续运转。步进电机的工作频率取决于软件循环查表和输出状态的时间,改变查表方向,便可以实现电机的正、反转。
软件环分器的优点是硬件简单,但占用了软件运行时间,故只用于速度要求不高、系统比较简单的数控系统,如电脑绣花机、绘图仪等。
当软件任务多时,可用硬件实现软件功能,就是硬环分器 。
环形分配器的主要功能是把来源于控制环节的时钟脉冲串按一定的规律分配给步进电动机驱动器的各相输入端。环形分配器的输出既是周期性的,又是可逆的。
接受时钟脉冲串和方向电平,输出各相的导通信号,是环形分配器的基本功能。
步进电机驱动系统中,控制器与驱动器之间的联系分为串行控制和并行控制。
串行控制时,控制器输出时钟脉冲串和方向电平,靠驱动器中的环形分配器转换成并行驱动信号驱动,控制各相绕组的导通和截止。时钟脉冲的有无决定了电动机的运行和停止,脉冲的频率决定电机运行的速度,方向电平决定运转的方向。
并行控制时,控制器直接输出各相绕组导通或截至的并行信号,此时环形分配器设在控制器中。
除单纯由软件来代替环形分配器的功能外,不论是串行控制还是并行控制,整个系统必须有环形分配器这个环节。
分配器就是把一路信号平均分成几路相等的信号输出,即每个输出口的衰减值一样大
视频分配器--我们一般指复合视频信号的分配设备 设备一般有 DVD 摄像头等设备的VIDEO信号VGA分配器一般指电脑的输出信号 且一路VGA信号源分配到几个甚至几十个显示设备上进行显示您前端...
有线连着是都供电,没有线连着是各管各的。

 步进电机三相六拍环形分配器
步进电机三相六拍环形分配器
步进电机三相六拍环形分配器
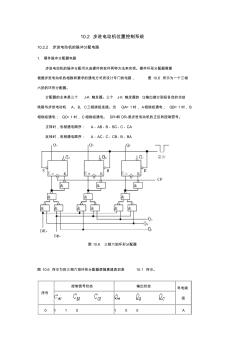
10.2 步进电动机位置控制系统 10.2.2 步进电动机的脉冲分配电路 1. 硬件脉冲分配器电路 步进电动机的脉冲分配可以由硬件和软件两种方法来实现。硬件环形分配器需要 根据步进电动机的相数和要求的通电方式而设计专门的电路, 图 10.6 所示为一个三相 六拍的环形分配器。 分配器的主体是三个 J-K 触发器。三个 J-K 触发器的 Q输出端分别经各自的功放 线路与步进电动机 A、B、C三相绕组连接。当 QA= 1时, A相绕组通电; QB=1 时, B 相绕组通电; QC=1 时, C相绕组通电。 DR+和 DR-是步进电动机的正反转控制信号。 正转时,各相通电顺序: A-AB-B-BC-C-CA 反转时,各相通电顺序: A-AC-C-CB-B-BA 图 10.6 三相六拍环形分配器 图 10.6 所示为的三相六拍环形分配器逻辑真值表如表 10.1 所示。 序号 控制信号状态 输出
根据结构的不同,开环控制系统分为串行控制和并行控制两种。具有串行控制功能的单片机系统与步进电动机驱动电源之间具有较少的连线,驱动电源必须含有环形分配器。用微机系统的数条端线直接控制步进电动机各相驱动电路的方法称为并行控制。在驱动电源内不包括环形分配器,其功能必须由微机系统完成。
为了实现步进电动机的速度和加速度控制,需要控制系统发出脉冲的频率或者换相周期。可以用软件延时和定时器两种方法确定脉冲的周期(频率)。
软件延时方法是通过延时子程序实现的,它占用CPU的时间;定时器方法则是通过设置定时时间常数的方法实现的。步进电动机的闭环控制越来越受到重视,已发展出模糊控制、矢量控制等多种方式。有的步进电动机还带有传感器,为构成闭环控制提供了条件 。2100433B
由于步进电动机具有根据脉冲指令运行的能力,在开环控制中与其他电动机有不可比拟的优势。随着对控制精度的要求越来越高,为了对步进电动机的失步、越步或细分精度进行补偿,利用步进电动机构成闭环的应用越来越多。
根据各部分功能采用的元件不同,开环系统分为很多种。例如控制器有专用控制器、计算机型控制器(指广义的计算机,如个人计算机、单片机、DSP、PLC、FPGA和DDS等);环形分配器可由硬件构成,或用专用芯片实现,或用计算机软件设计实现;驱动器可以是由电力电子元件设计的一般放大器,也可以是PWM驱动器等 。
前 言
项目1 机电一体化中的伺服传动控制技术与实践 1
任务1-1 步进电动机传动控制 1
任务1-2 直流伺服电动机传动控制 8
任务1-3 交流伺服电动机传动控制 16
仿真实验: 反应式步进电动机环形分配器实验 26
创新案例: 垂直型自启闭风力发电机装置设计 29
思考与练习 33
项目2 机电一体化中的检测技术与实践 34
任务2-1 晶振外壳缺陷在线抽检系统 34
任务2-2 认识汽车电控汽油喷射系统 42
任务2-3 认识汽车安全气囊的检测 55
仿真实验: 机电一体化控制仿真实验 66
创新案例: 汽车防撞系统设计案例 67
思考与练习 69
项目3 机电一体化中的PLC 控制技术与实践 70
任务3-1 三相异步电动机连续控制 70
任务3-2 组合机床动力滑台控制 77
任务3-3 升降电梯机电传动与控制 84
仿真实验: PLC 与上位机通信实验 102
创新案例: 月球寻轨通信型智能小车设计 104
思考与练习 108
项目4 机电一体化系统的常用控制策略与实践 109
任务4-1 模拟PID 调节器 109
任务4-2 数字PID 的直流电动机控制 117
任务4-3 模糊控制 126
仿真实验: 机电气一体化系统控制实验 136
创新案例: 遥控式汽车车位自动占位系统 138
思考与练习 140
项目5 简单机电一体化设备的技术与实践 141
任务5-1 认识3D 打印机 141
任务5-2 小型智能绘图仪 150
任务5-3 三坐标测量机 163
仿真实验: 简单机电一体化系统元件组合操作实验 171

