环形分配器主要功能文献


 步进电机三相六拍环形分配器
步进电机三相六拍环形分配器
步进电机三相六拍环形分配器
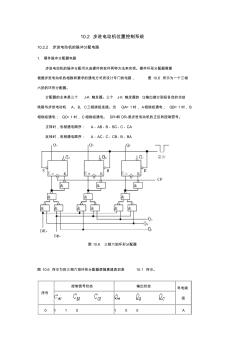
10.2 步进电动机位置控制系统 10.2.2 步进电动机的脉冲分配电路 1. 硬件脉冲分配器电路 步进电动机的脉冲分配可以由硬件和软件两种方法来实现。硬件环形分配器需要 根据步进电动机的相数和要求的通电方式而设计专门的电路, 图 10.6 所示为一个三相 六拍的环形分配器。 分配器的主体是三个 J-K 触发器。三个 J-K 触发器的 Q输出端分别经各自的功放 线路与步进电动机 A、B、C三相绕组连接。当 QA= 1时, A相绕组通电; QB=1 时, B 相绕组通电; QC=1 时, C相绕组通电。 DR+和 DR-是步进电动机的正反转控制信号。 正转时,各相通电顺序: A-AB-B-BC-C-CA 反转时,各相通电顺序: A-AC-C-CB-B-BA 图 10.6 三相六拍环形分配器 图 10.6 所示为的三相六拍环形分配器逻辑真值表如表 10.1 所示。 序号 控制信号状态 输出