机电系统设计文献

 机电系统设计概述
机电系统设计概述
机电系统设计概述
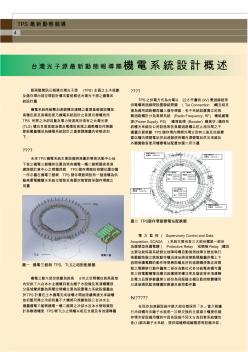
硩兩螯簡訊已報導台灣光子源 (TPS) 全區之土木規劃 及儲存環內部空間設計蠣本螯將概述台灣光子源之機電系 統設計蠤 機電系統係維繫加速器穩定運轉之重要基礎建設蠣故 高穩定度及高精密度乃機電系統設計之首要目標蠣然而 TPS 所需之冷卻容量及電力皆遠高於現有之台灣光源 (TLS) 蠣且目硩面臨油價及電價皆高漲之趨勢蠣如何兼顧 節能餥量蠣成為機電系統設計之重要課題蠤內容略述如 下: ???? 未來 TPS機電系統主要設備將規劃於學術活動中心地 下室之機電三館蠣其位置為現有機電一蠖二館螟國家高速 網路螟計算中心之間蠣其螟 TPS儲存環館的相關位置如圖 一所示蠤在機電三館螟 TPS儲存環館間設有一隧道蠣為供 輸高壓電纜蠖水系統主管路及高壓空氣管路至儲存環館之 用蠤 機電三館大部份規劃為挑高 8米之空間蠣在挑高區域 內安排了六台冰水主機蠖四套去離子水設備及泵浦蠣蠪部 分區域輦規劃為兩層空間蠣主要為設
 住宅机电系统设计管控要点
住宅机电系统设计管控要点
住宅机电系统设计管控要点
住宅机电系统设计管控要点 本标准为绿城房地产集团机电专业设计人员提供参考 和借鉴,亦可作为项目公司安装工程管理人员的工作指引。 图纸完整性要求住宅机电系统设计应严格遵循国家、行业及 地方的政策法规、标准规范及相关规定,设计成果文件应达 到国家建设部《建筑工程设计文件编制深度规定》 (2008 版) 的深度要求。设计成果文件应包括设计说明、平面图、系统 图、机房大样图、机电安装详图等,应做到内容完整,表达 清晰,便于施工。对所采用的标准图应注明标准图号和名称。 所有预埋件和预留孔均应标注定位尺寸、标高,明确做法详 图。毛坯房应绘制、安装详图,精装修房除绘制上述图纸外 还应绘制户型大样图、 厨房、卫生间大样图、 机房大样图等, 各专业设备、设备接口、阀门、定位尺寸、标高标注应齐全 准确。设计阶段应充分考虑设备安装的空间与环境,其平面 位置、安装尺寸、 检修通道须满足设备的吊装、 搬运、安装、