轮系文献

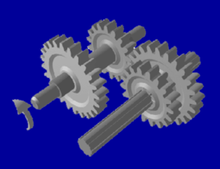
 功率分流四分支轮系建模与承载特性分析
功率分流四分支轮系建模与承载特性分析
功率分流四分支轮系建模与承载特性分析
为了准确得到弹性支撑下功率分流四分支轮系的承载特性,建立其力学结构模型,推导出变形协调条件。考虑中心距安装误差、轴交角误差、轴承弹性支撑刚度对轮齿接触轨迹及传递误差曲线的影响会导致时变啮合刚度曲线的变化,进而在轮齿承载接触法的基础上分析了弹性支撑下各误差存在时功率分配的情况。结果表明,弹性支撑刚度条件会导致仿真结果差异较大,弹性支承更符合实际。为四分支传动系统的设计与分析提供参考。