机器人传感系统发展趋势文献

 传感器技术的应用与发展趋势分析
传感器技术的应用与发展趋势分析
传感器技术的应用与发展趋势分析
传感器技术的应用与发展趋势分析
 光纤光栅传感器及其发展趋势
光纤光栅传感器及其发展趋势
光纤光栅传感器及其发展趋势
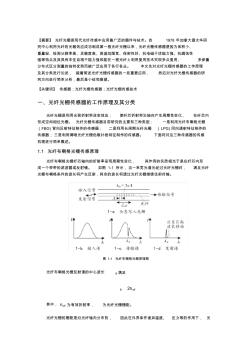
【摘要】 光纤光栅是现代光纤传感中应用最广泛的器件与技术。自 1978 年加拿大渥太华研 究中心利用光纤的光敏效应成功制成第一根光纤光栅以来,光纤光栅传感器便因为体积小、 重量轻、检测分辨率高、灵敏度高、测温范围宽、保密性好、抗电磁干扰能力强、抗腐蚀性 强等特点及其具有本征自相干能力强和能在一根光纤上利用复用技术实现多点复用、 多参量 分布式区分测量的独特优势而被广泛应用于各行各业。 本文先对光纤光栅传感器的工作原理 及其分类进行论述, 接着简述光纤光栅传感器的一些重要应用, 然后对光纤光栅传感器的研 究方向进行简单分析,最后是小结和展望。 【关键词】 传感器;光纤光栅传感器;光纤光栅传感技术 一、光纤光栅传感器的工作原理及其分类 光纤光栅是利用光致折射率改变效应, 使纤芯折射率沿轴向产生周期性变化, 在纤芯内 形成空间相位光栅。 光纤光栅传感器目前研究的主要有三种类型: 一是利用光纤布喇