智能协调控制基于性能反馈的智能控制文献

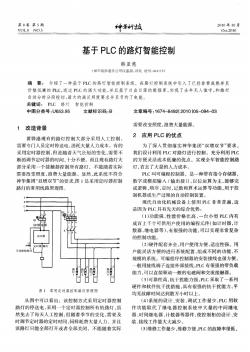 基于PLC的路灯智能控制
基于PLC的路灯智能控制
基于PLC的路灯智能控制
基于PLC的路灯智能控制
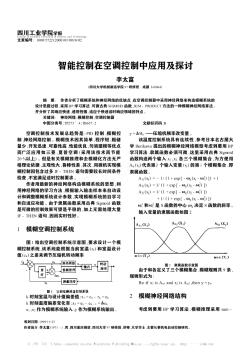 智能控制在空调控制中应用及探讨
智能控制在空调控制中应用及探讨
智能控制在空调控制中应用及探讨
作者分析了模糊系统和神经网络的优缺点 ,在空调控制器中采用神经网络来构造模糊系统的设计思路过程 :采用BP学习算法、可微古典SIGMOID函数 ,SUM -PRODUCT方法的一种模糊神经网络算法。并分析了其响应快速 ,通用性强 ,适应于快速适时响应领域的特点