混合式步进电机结构和驱动文献

 110三相混合式步进电机
110三相混合式步进电机
110三相混合式步进电机
典型适配驱动器: SH-32205 货物 编码 型 号 相 数 步距角 ( °) 静态 相电流 (A) 相 电 阻 (Ω ) 相 电 感 (mH) 保持 转矩 (N m) 定位 转矩 (N m) 电压 (VDC) 重 量 (Kg) 转动 惯量 (gcm 2 ) 062150 110BYG350BH-SAKSMA-0501 3 0.6/1.2 5.0 0.9 8.5 8 0.5 80~350 6.6 9720 062160 110BYG350CH-SAKSMA-0501 3 0.6/1.2 5.0 0.9 12.6 12 0.5 80~350 9 13560 062170 110BYG350DH-SAKSMA-0501 3 0.6/1.2 5.0 0.9 11 16 0.6 80~350 11.1 17400 三相混合式步进电动机 110 系列 低温升,高转矩,低噪音,低振动 绝缘电阻——
 35系列二相混合式步进电机
35系列二相混合式步进电机
35系列二相混合式步进电机
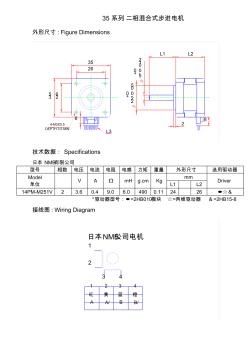
35系列二相混合式步进电机 外形尺寸 : Figure Dimensions 35 26 35 26 4-M3X0.5 DEPTH 3.5 MIN 6 5+ 0 -0 .0 12 22 +0 -0 .0 5 2 8 L1 L2 L3 技术数据: Specifications 日本 NMB有限公司 型号 相数 电压 电流 电阻 电感 力矩 重量 外形尺寸 选用驱动器 Model 单位 V A Ω mH g.cm Kg mm Driver L1 L2 14PM-M251V 2 3.6 0.4 9.0 6.0 490 0.11 24 26 ●☆& *驱动器型号:●=2HB010模块 ☆=两维驱动器 &=2HB15-8 接线图 : Wiring Diagram 1 2 3 4 1 2 43 橙蓝黄红 A A/ B B/ 日本NMB公司电机 39系列二相混合式步进电机 外形尺寸 : Fi